
Bonjour,
J'aurais souhaité votre avis sur un schéma que je prépare pour le branchement d'un L293D.
Merci pour vos retours
-----

Bonjour,
J'aurais souhaité votre avis sur un schéma que je prépare pour le branchement d'un L293D.
Merci pour vos retours
Bonjour TachikomaWebI et tout le groupe
Bienvenue sur le forum.
Sans en savoir "un peu" plus, cest impossible.Envoyé par TachikomaWebI

À quoi ça sert. Quest-ce que cest supposé faire?
Quelles sont les caractéristiques des moteurs? Leur puissance? Leur technologie?
Quel est lenvironnement?
Sil savère que cest un travail scolaire, il faut montrer ce qui a déjà été fait, et quel est le détail qui te bloque.
Bonjour et merci gienas;
C'est un petit projet perso, pour le pilotage de deux petits moteur, dans les deux sens depuis un Raspberry.
Rien ne me bloque en soit, je n'ai juste pas tout les composants pour tester le schéma, donc de préférence je préféré me renseigner si le schéma parait correct avant de m'attaquer à la schématisation d'un PCB ^^
J'avais des souvenirs d'école comme quoi sur ISIS ont pouvaient faire des simulations, mais la depuis EasyEDA je n'ai pas trouvé
Pour les infos moteurs voilà ce que j'ai :Quelles sont les caractéristiques des moteurs? Leur puissance? Leur technologie?
Torsion: 0.7kg
Tension de fonctionnement: 4.8-6V
Angle d'utilisation: 360 degrés
Type de Terminal: terminal DuPont
Rapport de réduction de vitesse: 1:300
Vitesse du produit: 90/ min (6V)
c'est à dire ?Quel est l’environnement?
Bonne journée
bonjour,
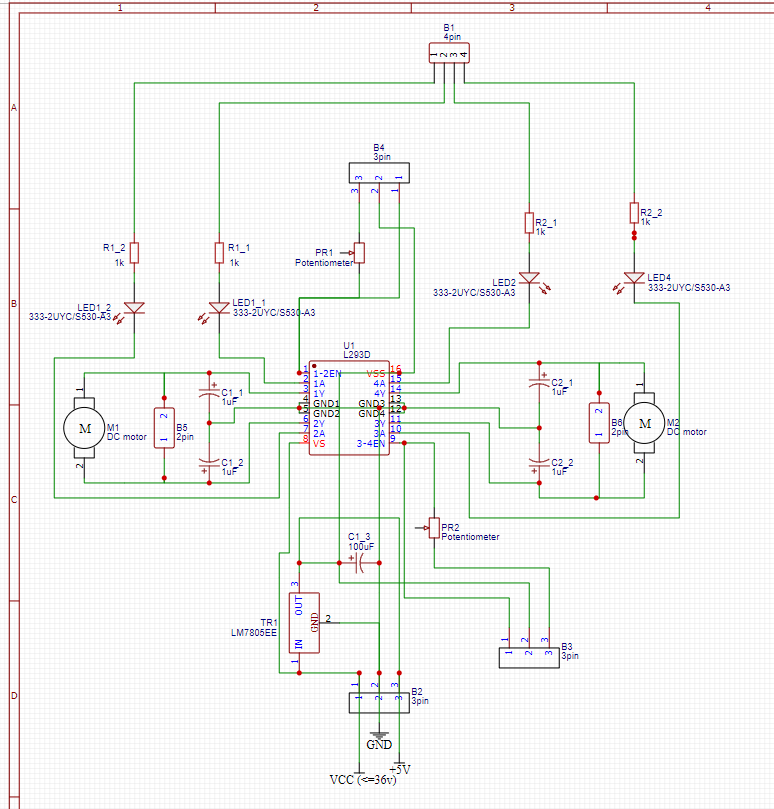
une remarque d'abord : ne pas faire passer les connexion sur les figurines cela rend le schéma illisible,là c'est très cochonou!
ensuite les LED en serie avec les pins de commandes du 293 cela ne fonctionnera pas , ni les LEDs ni le 293.
Si tu veux avoir de la lumière et du son alors ces Leds sont à placer en // avec les entrée avec les pullup(pulldown) ramenés au5V(GND).
JR
l'électronique c'est pas du vaudou!
Merci pour votre retour;
Oui, je comprends, mais il y'a certains sacs de nœuds dont je n'arrive pas à me défaire :/une remarque d'abord : ne pas faire passer les connexion sur les figurines cela rend le schéma illisible,là c'est très cochonou!
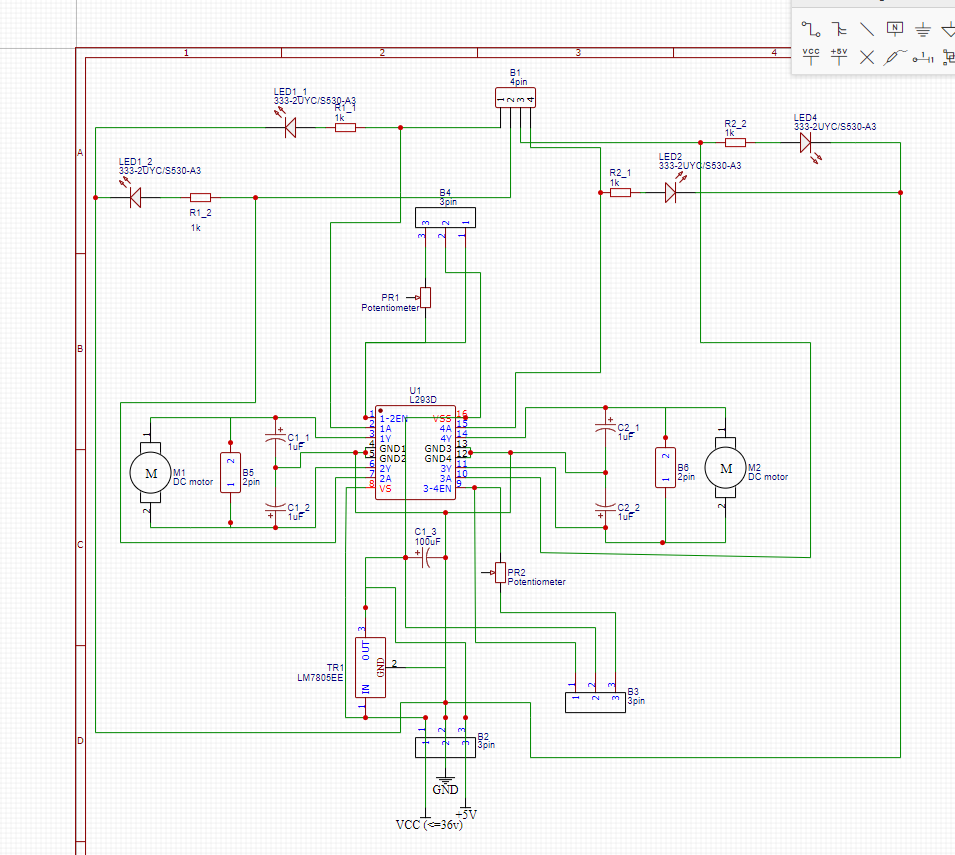
est-ce qu'avec ce montage en Pulldown cela vous parait plus correcte ?
ça nous donne pas la puissance à fournir. Le L293D est donné pour 600mA par sortie !Pour les infos moteurs voilà ce que j'ai :
Torsion: 0.7kg
Tension de fonctionnement: 4.8-6V
Angle d'utilisation: 360 degrés
Type de Terminal: terminal DuPont
Rapport de réduction de vitesse: 1:300
Vitesse du produit: 90/ min (6V)
Tout existe, il suffit de le trouver...!
Si j'avais d'avantage d'informations je vous l'ai aurais donné. ^^
https://fr.aliexpress.com/item/10050...ee9a6c37DKG15G
Bonjour,
- Supprimer C1_x et C2_x, ou à minima les diviser par 1000 ;
- Pour éviter les sac de noeuds, utiliser des labels et le symbole de masse (sur ce schéma, par exemple : https://forums.futura-sciences.com/a...s-sch-alim.gif, toutes les masses sont reliées ensembles mais on ne le montre pas pour simplifier le schéma)
- en théorie, il serait possible d'alimenter le moteur sous 36 V en limitant le rapport cyclique à ~16 V, mais en pratique ce n'est pas une bonne idée.
- ce pont en H est obsolète, et 36V est le max absolu acceptable
- il faut ajouter un bon filtrage du bus 36 V (eg 100 uF), et du 7805 (100nF en entrée et en sortie).
- A quoi servent VR1 et VR2 ? en l'état, il ne font rien.
- A quoi B1 est-il relié ? les masses doivent être communes, il est sans doute souhaitable d'avoir un fil de masse sur ce connecteur.
Il serait souhaitable de choisir un pont plus performant, et de diminuer la tension d'alimentation.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
Bonjour et merci pour ta réponse.
d'ac merci pour l'info- Supprimer C1_x et C2_x, ou à minima les diviser par 1000 ;
ok je vais regarder à cela, merci- Pour éviter les sac de noeuds, utiliser des labels et le symbole de masse (sur ce schéma, par exemple : https://forums.futura-sciences.com/a...s-sch-alim.gif, toutes les masses sont reliées ensembles mais on ne le montre pas pour simplifier le schéma)
Malheureusement je n'ai que ça sous la main et il est fonctionnel donc plutôt que de le jeter ^^- ce pont en H est obsolète, et 36V est le max absolu acceptable
yep, c'est juste un mémo pour moi que c'est max 36, mais il ne sera jamais alimenté au delà d'une pile 9V
c'est ce que j'ai mis avec C1_3 et TR1 à moins que mon câblage ne soit pas bon ?- il faut ajouter un bon filtrage du bus 36 V (eg 100 uF), et du 7805 (100nF en entrée et en sortie).
les potentiomètre PR1 & PR2 ? B3 & B4 sont des cavaliers prévue pour lier les pins 3-2 ou 2-1, en position 2-1 c'est pour une alimentation constante; en position 3-2 pour faire varier l'alimentation et donc la vitesse- A quoi servent VR1 et VR2 ? en l'état, il ne font rien.
Ce sont les pins liées au RaspberryPi pour le contrôle- A quoi B1 est-il relié ? les masses doivent être communes, il est sans doute souhaitable d'avoir un fil de masse sur ce connecteur.
bonjour
les pin d'enable ne se pilotent pas en continu elles activent ou non les étages de sortie elles attendent donc des niveaux logiques leur seul intérêt est de pouvoir faire de la "roue libre", le contrôle de vitesse s'obtient par PWM!
Attention le L293 a de grandes tensions de déchet il fonctionne tres mal en base tension.
JR
l'électronique c'est pas du vaudou!
Bonjour,
Merci pour vos conseils.
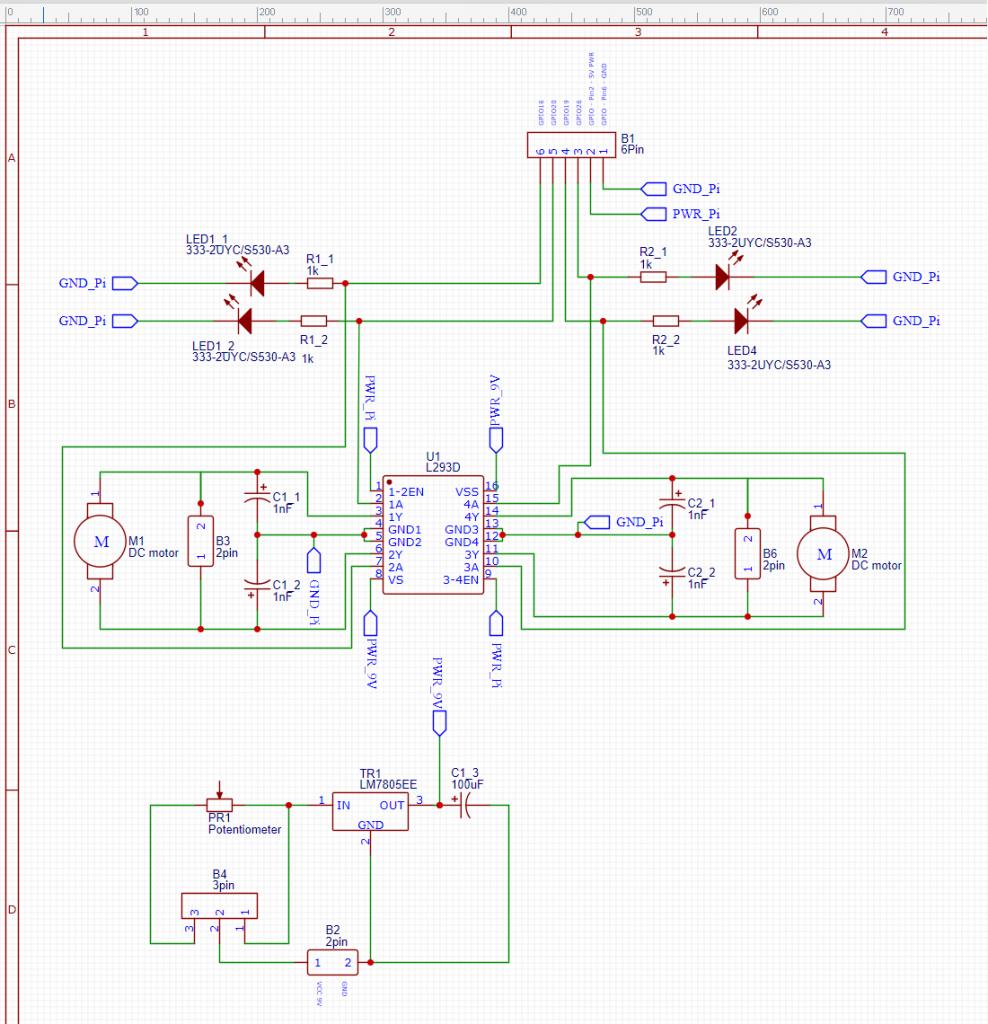
J'ai donc modifié mon schéma comme ceci, est-ce que cela vous parait plus correct ?
bonjour
presque il manque la liaison entre la masse du PI et celle du régulateur 5v qui ne doit être connecté qu'à la pin 16 du L293, il n'y a normalement pas besoin de réguler la tension utilisée en puissance(si le système est bouclé par des capteurs de vitesse) il faut juste la découpler.
PR1 ne sert à rien.
JR
l'électronique c'est pas du vaudou!
D'ac c'est noté pour PR1.
Par contre je ne suis pas sur de bien comprendre.
Je fais une masse commune ? Il n'est pas préférable d'isolé les deux circuits ?presque il manque la liaison entre la masse du PI et celle du régulateur 5v
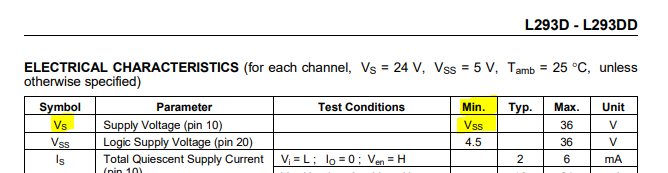
je n'ai peut etre pas compris mais dans la doc (page3), il est noté que VS(pin8) doit avoir au minimum la même tension que VSS(pin16)[...] régulateur 5v qui ne doit être connecté qu'à la pin 16 du L293
Il faudrait pour cela utiliser des optocoupleurs, ou autre isolateur de signal. Sans eux, relier les deux masses est indispensable.
Quelle est la tension arrivant sur B4 ?
La tension de sortie d'un 7805 est de 5V... pourquoi la noter "PWR_9V ?"
Oui.dans la doc (page3), il est noté que VS(pin8) doit avoir au minimum la même tension que VSS(pin16)
Pièce jointe 454971
Tu peux donc alimenter Vss sous 5V et Vs sous 9 V. Tu peux aussi connecter Vs et Vss directement au +9V, mais il faut limiter les tensions de EN à <7 V.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
bonjour
il ne peut y avoir de masses séparées puisqu'elles sont confondues sur le L293, la masse logique et la masse puissance sont les mêmes.
si on veut séparer commande et puissance il faut comme Antoane le suggère passer par des optos.
JR
l'électronique c'est pas du vaudou!

{kind=link}