

Bonjour,
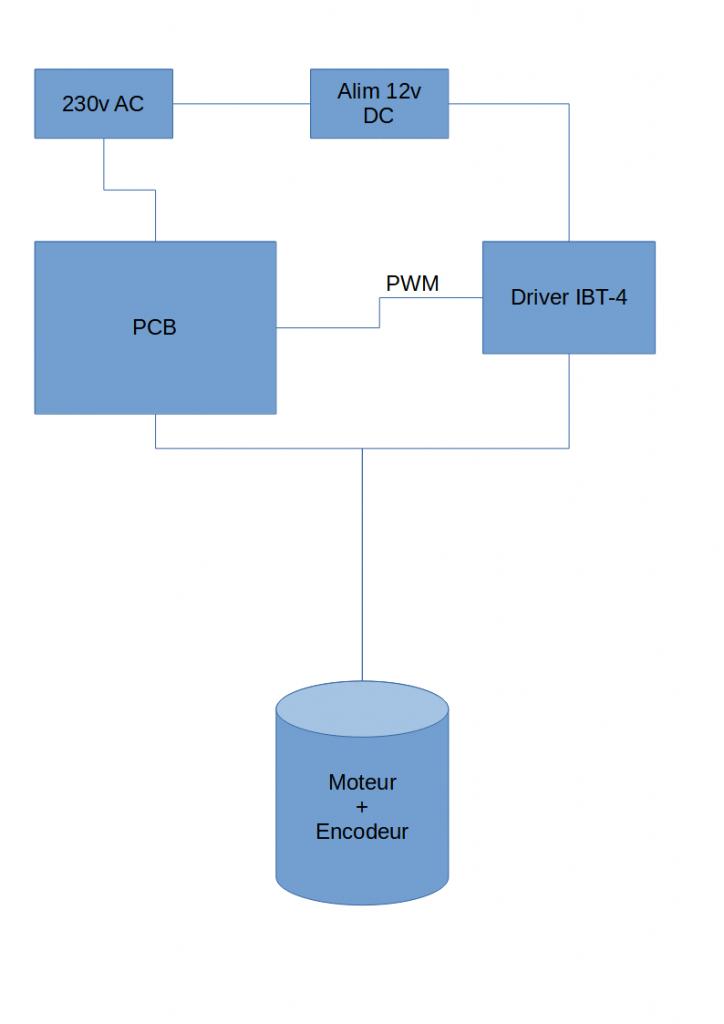
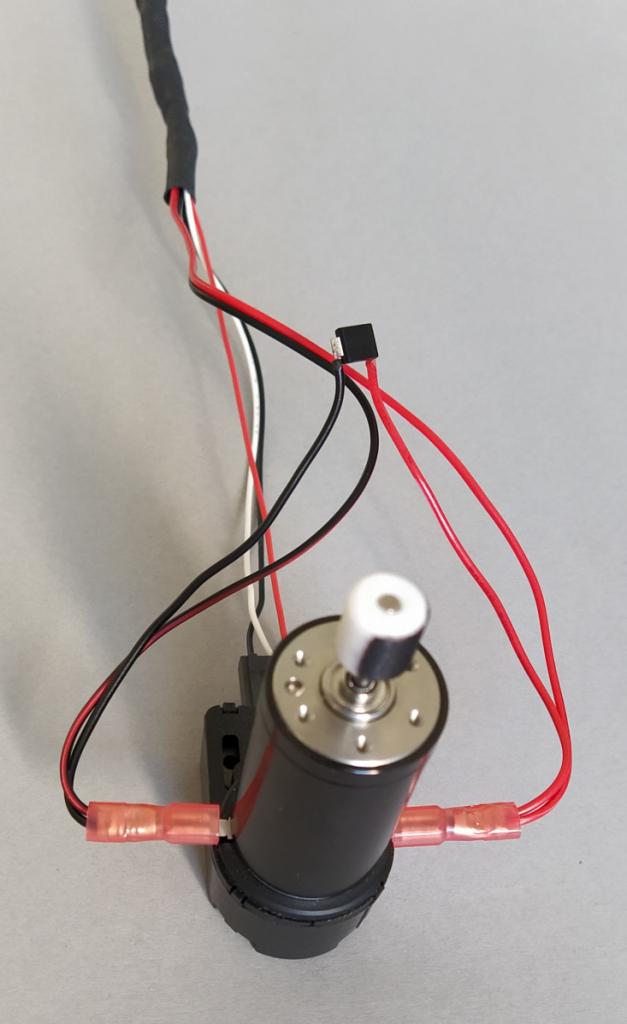
voilà un bon moment que je galère pour piloter mon moteur 12v DC (2A max).
J'ai fait des tests en utilisant une carte IBT-4 ( https://www.amazon.fr/KNOSSOS-Driver.../dp/B07MBNYMDH )
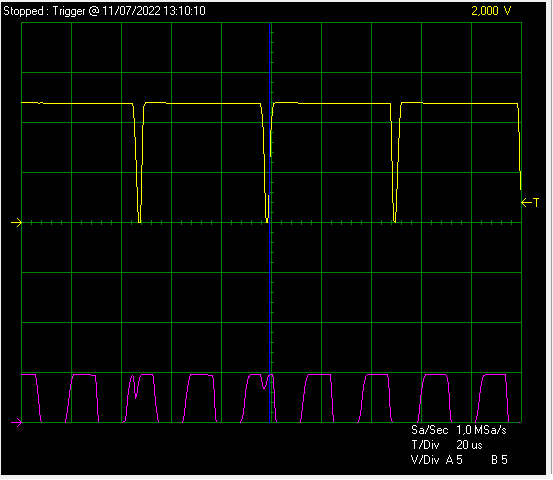
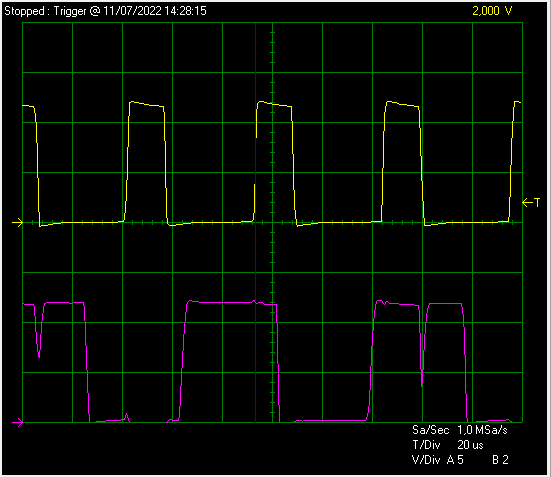
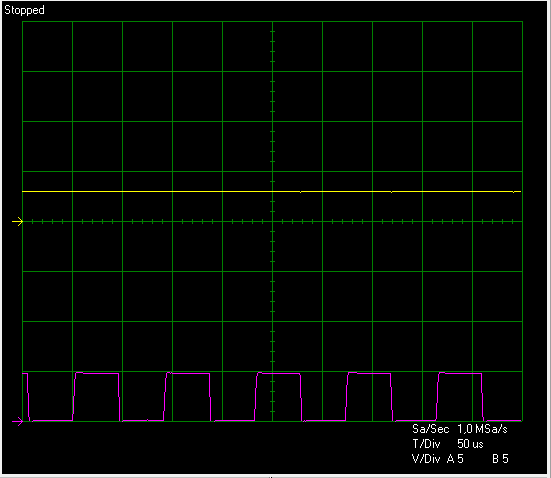
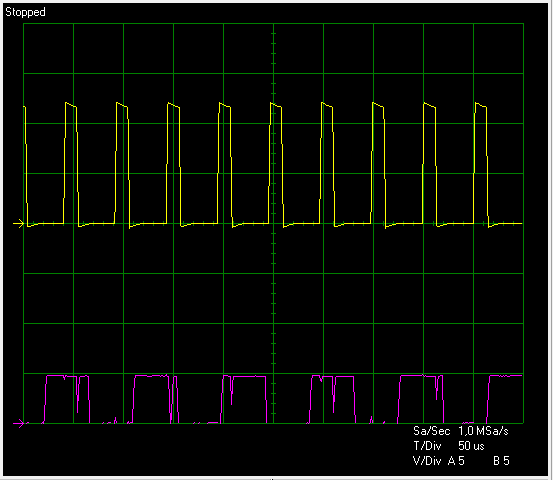
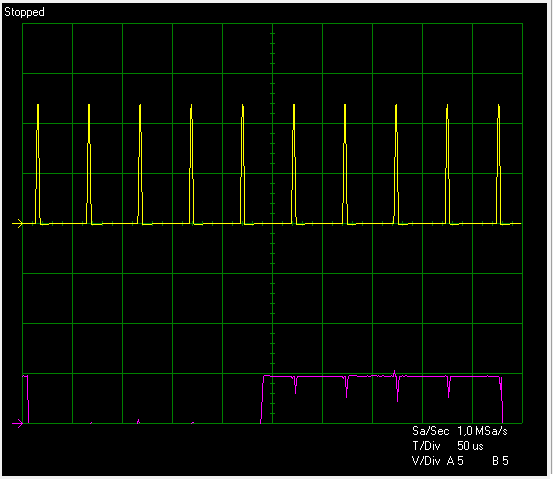
Et ça marche pas mal sauf que j'ai énormément de parasites sur les signaux de l'encodeur du moteur, tellement que mon CPU voit des impulsions qui n'existent pas.
Pourtant, quand j'utilise mon alim de labo pour faire varier la tension, je n'ai aucun parasites.
Donc ma question à 1kg de cacahuètes : est-ce qu'il existe des driver "linéaires" pour moteur, c'est a dire qui ne sortent pas un PWM, mais une tension fixe ... comme le fait mon alim de labo !
Dans l'idéal, je voudrais piloter la vitesse via un PWM (un seul sens de marche).
Merci.
-----









{kind=link}
{kind=link}
{kind=link}