


Bonjour,
J'ai un problème dans mon programme informatique, mais comme celui ci est purement mathématique, j'espère avoir choisi la bonne catégorie
Alors voila, pour représenter une ellipsoïde dans l'espace, il faut plusieurs paramètres:
-ses deux rayons (grand et petit axe) ainsi que son orientation dans l'espace:
-l'angle Heading, sa rotation autour de son axe z: pour une ellipsoïde on s'en fiche (contrairement à un carré quoi), donc j'ai mis 0
-l'angle Tilt, sa rotation sur l'axe Est Ouest
-l'angle Roll, sa rotation sur l'axe Nord Sud
orientationParams.gif
Je coince à trouver ces deux derniers paramètres :/ Voila mes données:
-les rayons de l’ellipsoïde,
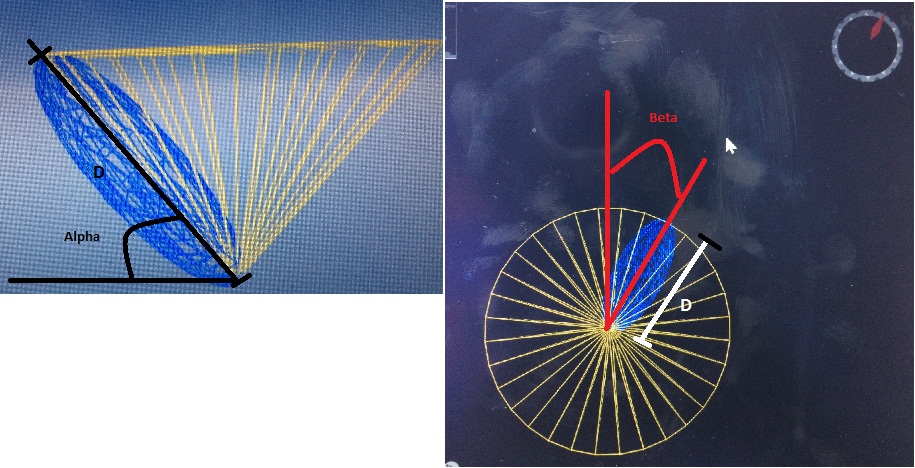
-son angle par rapport au sol Alpha
-Son angle par rapport au nord dans le sens des aiguilles d'une montre (comme si on regardait une boussole) Beta
Voila une photo récapitulative:
FullSizeRender.jpg
J'ai toujours eu des difficultés à me représenter les angles dans l'espace, mais là je bloque totalement. En faisant des projections j'ai cherché à mettre des angles de depart en relation avec ceux d'arrivée mais sans succes.
Simplement (car très logique, je trouve:
-A la position plein nord, j'ai le couple (tilt, roll) qui vaut ( PI/2-Alpha, 0)
-A la position plein Sud, j'ai le couple (tilt, roll) qui vaut ( -PI/2+Alpha, 0)
-A la position plein Ouest, j'ai le couple (tilt, roll) qui vaut ( 0 , PI/2-Alpha)
-A la position plein EST, j'ai le couple (tilt, roll) qui vaut ( 0 , -PI/2+Alpha)
Voila, si vous avez un embryon de piste, je suis preneur
EDIT: je me suis peut-être mal exprimé: je veut donc la formule pour passer de mes deux angles de depart aux angles d'arrivées tilt et roll... et ce quelque soit l'orientation de l'ellipse (vers le NORD EST ou SUD OUEST)


-----

{kind=link}
{kind=link}