


Bonjour, je suis étudiant en CPGE ATS et j'aimerais vous demander confirmation sur ce que j'ai compris des pseudos forces.
Les pseudos forces apparaissent lorsque l'on se trouve dans un repère non galiléen? C'est à dire quand il est accéléré p/r au référentiel?
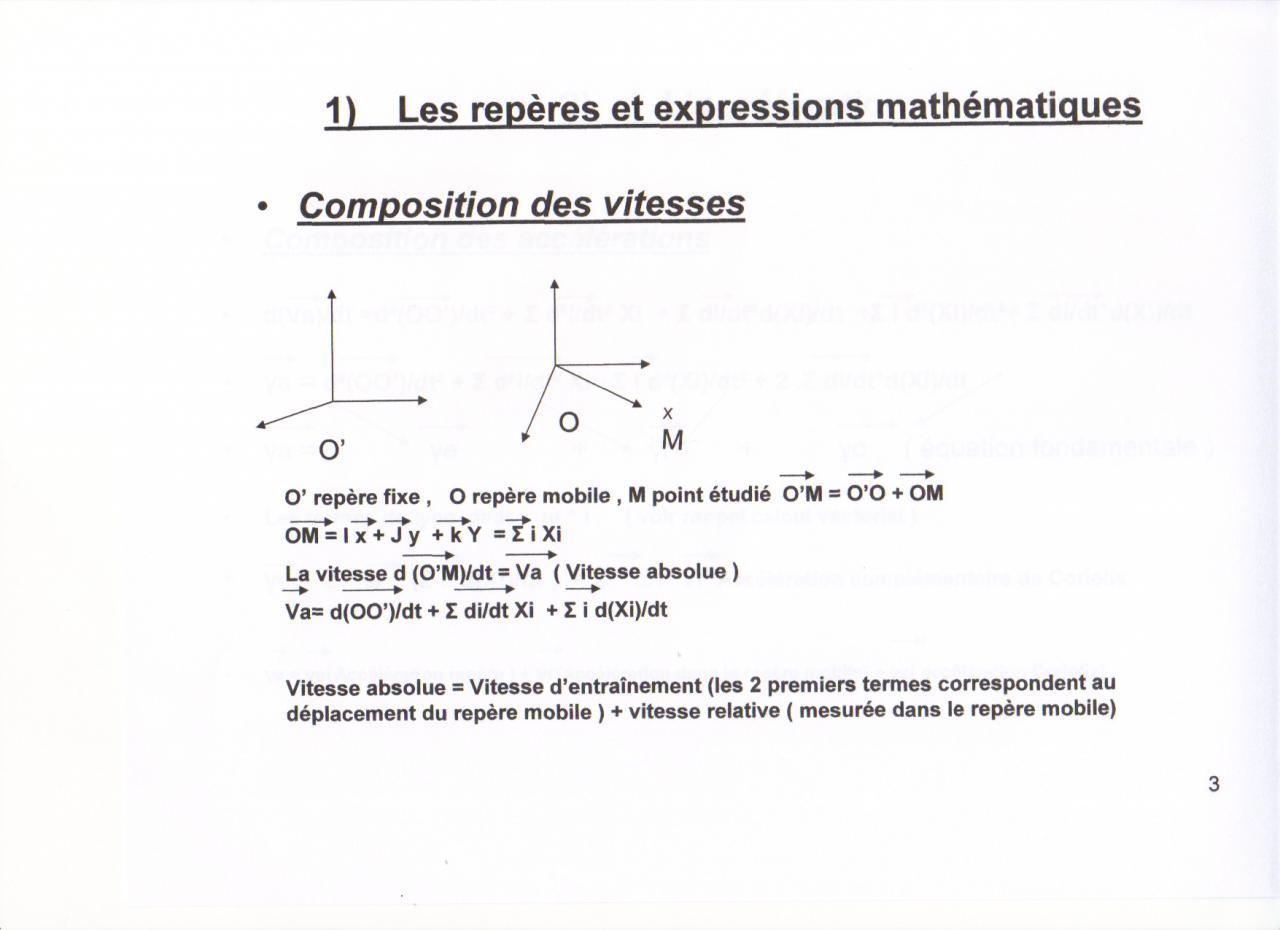
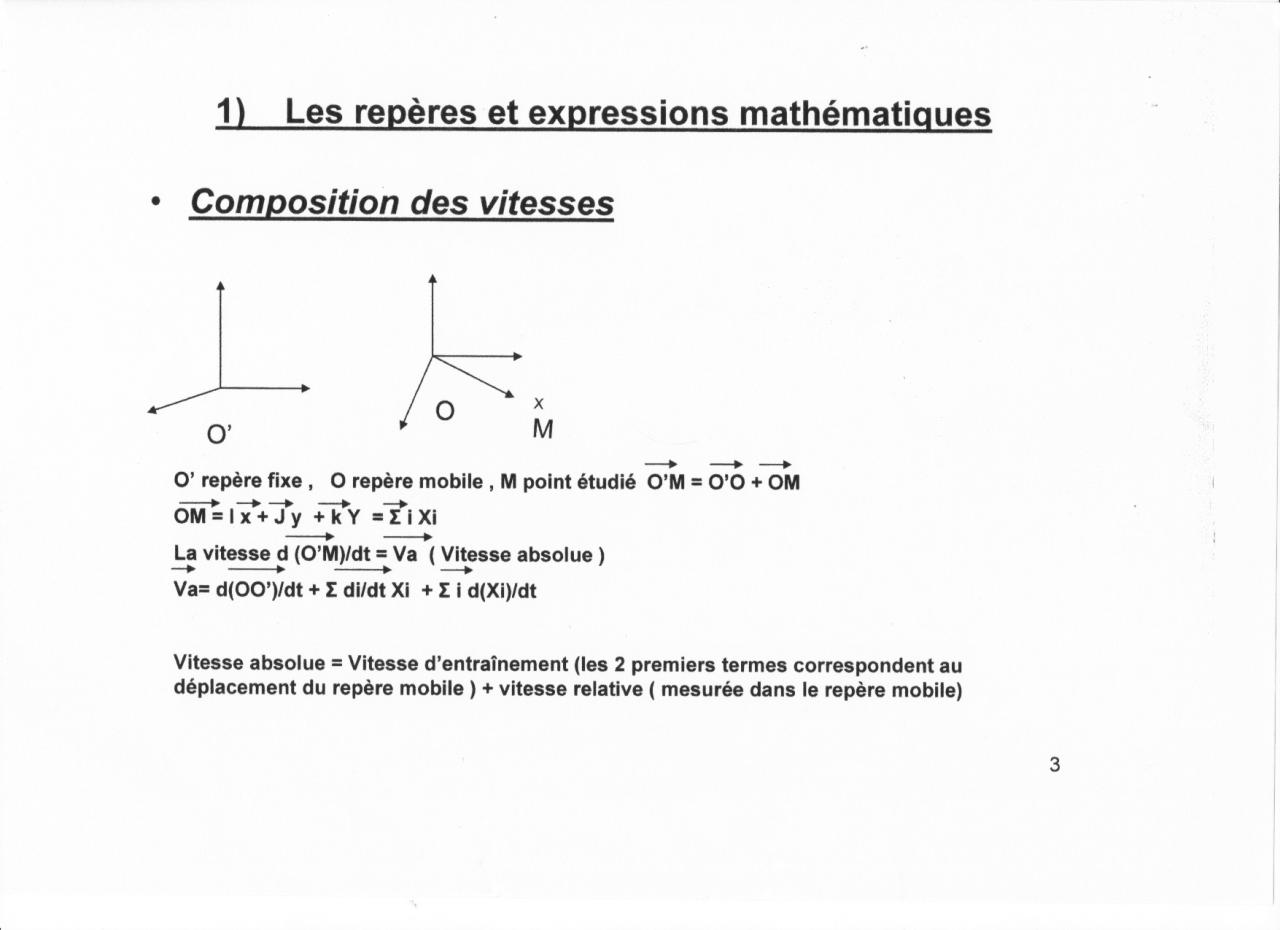
Dans un référentiel galiléen, un repère Rg et un point P.
m*Γ(P/Rg)= somme(Fext)
Dans un référentiel non galiléen, un repère R, un repère R' et un point P.
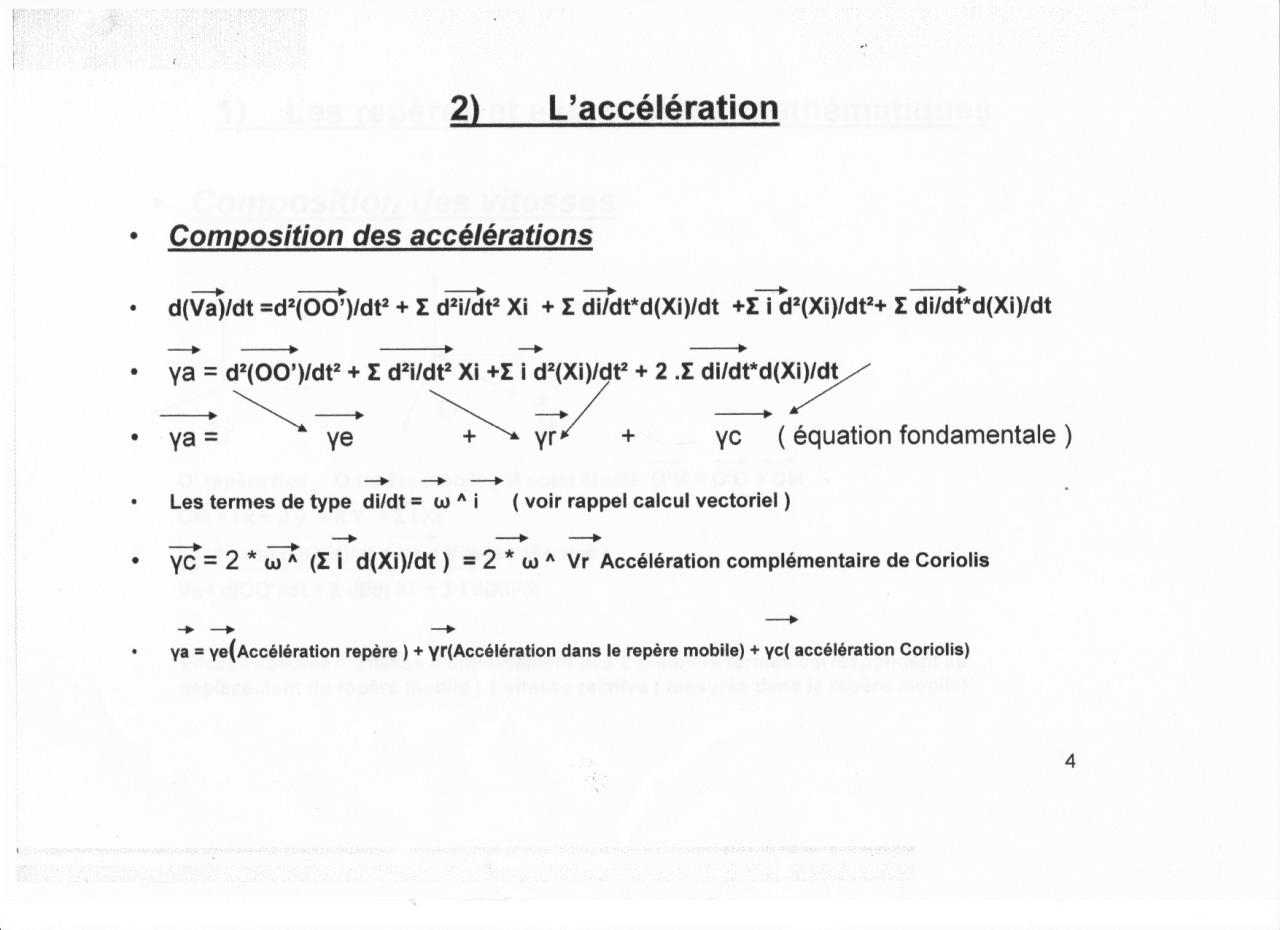
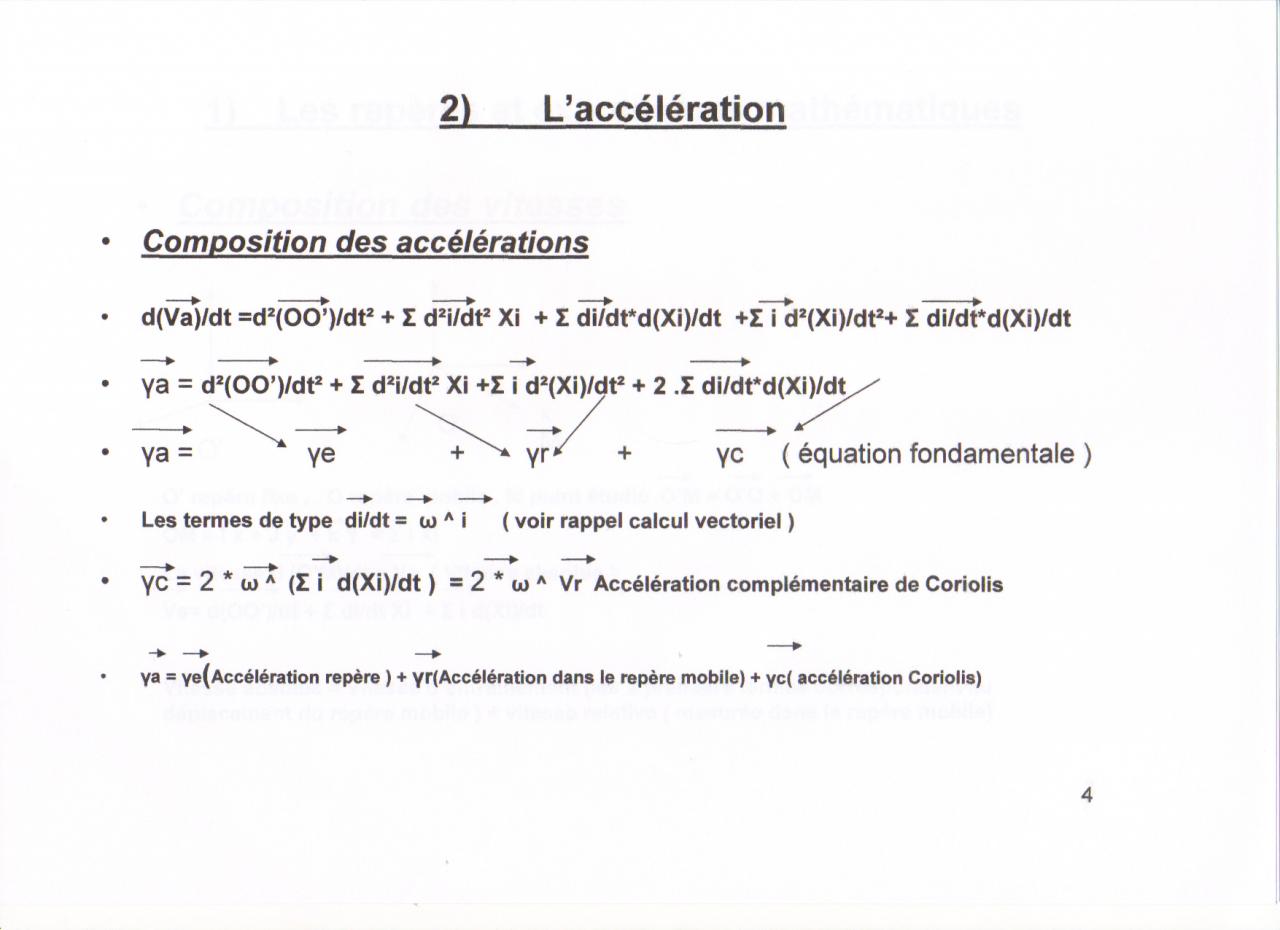
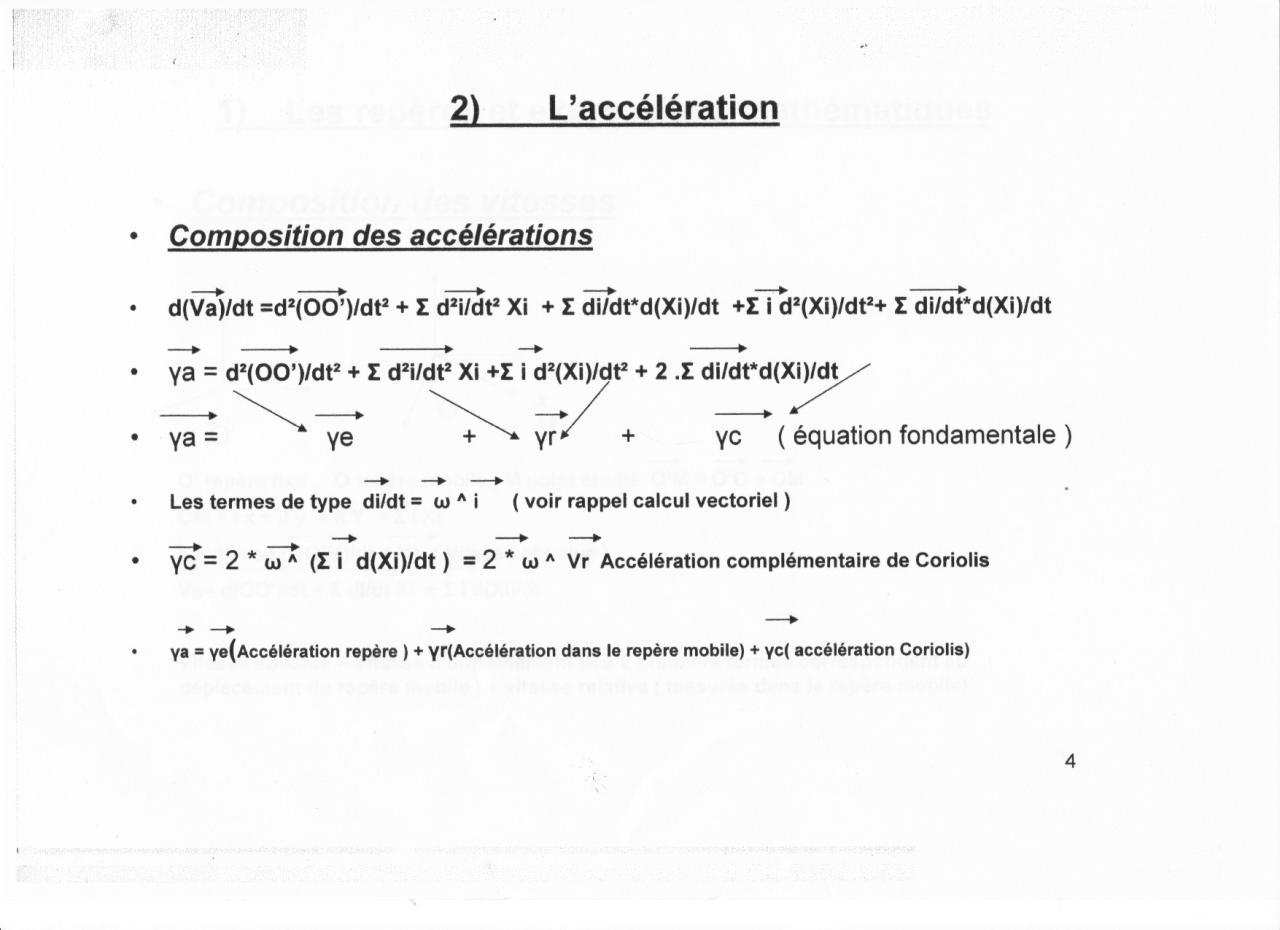
Γ(P/R) = Γ(P/R') + Γ(coriolis) + Γ(entrainement)
m*Γ(P/R) = m*Γ(P/R') + m*Γ(coriolis) + m*Γ(entrainement)
somme(Fext) = m*Γ(P/R') + m*Γ(coriolis) + m*Γ(entrainement)
m*Γ(P/R') = somme(Fext) - m*Γ(coriolis) - m*Γ(entrainement)
m*Γ(P/R') = somme(Fext) + fc + fe
Où fc est la pseudo force de Coriolis: fc = -m*Γ(coriolis) = -m ( 2Ω(R/R')∧V(M/R') )
Où fe est la pseudo force de d'inertie: fe = -m*Γ(entrainement) = -m [ Ω(R'/R)∧[Ω(R/R')∧OP] ]
Jusque là est-ce bon?
Le problème c'est que ces équations sont toutes dépendantes d'un Ω, càd la rotation relative entre deux repères... Alors quand j'ai un mouvement rectiligne accéléré les pseudos forces d'inertie et de Coriolis n'existent pas? C'est ça que je ne comprend pas.
Exemple quand je suis en voiture, dans un virage, je ressens la pseudo force d'inertie car je tourne. Or quand j'accélère en ligne droite, c'est pourtant pareil? Je ressens bien bien la force qui me plaque au siège.
Je me suis trompé quelque part? Une explication? Je vous en serais reconnaissant. Merci, bon dimanche!
-----

 Merci!
Merci!
{kind=link}
{kind=link}