

Bonjour,
Je suis actuellement étudiant ingénieur en première année de cycle et rencontre des difficultés concernant le sujet : Robot parallèle a cable.
Dans le cadre de notre projet, il s'agit de modéliser avec un logiciel 3D ce type de robot de dimensions 1m cube.
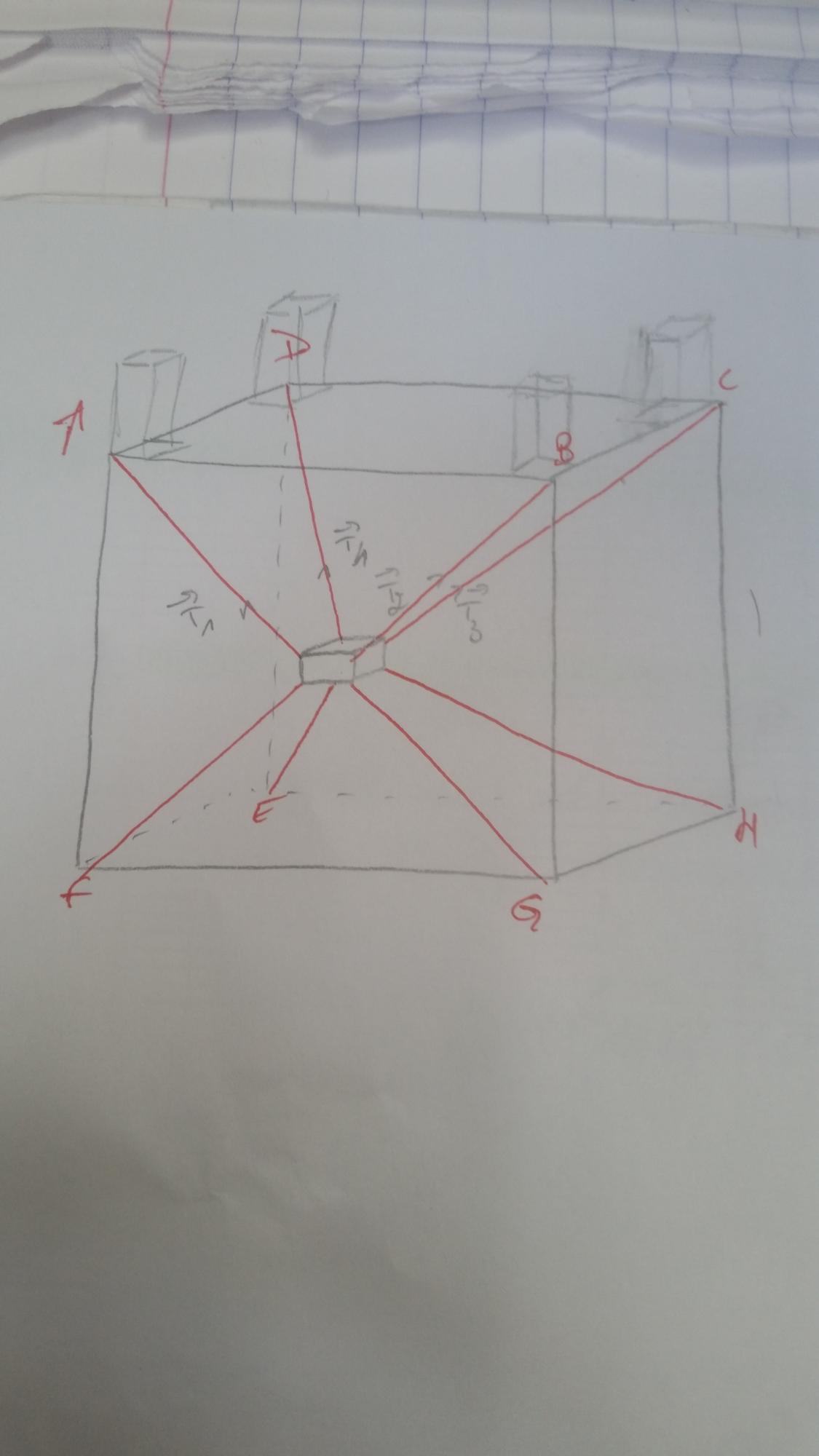
Ci joint un schéma du problème. ==> 20170509_150844.jpg
Le principe : une masse m est déplacée dans un espace défini, à l'aide de 8 câbles. Les câbles sont étirables ou rétractables à l'aide d'un servomoteur placé en chaque coin de la structure de support (structure cubique de 1x1x1).
De là nous devons donc choisir un servomoteur adapté à la masse déplacée repartie sur chacun des câbles. Nous nous basons sur la recherche de la position de la charge dans l'espace où la tension et la masse soumises à un des câbles sont maximales, afin de déterminer le couple que doit avoir un servo pour réaliser les différents mouvements.
Ici se pose le problème : Comment trouver cette position?
{kind=link}
-----