


Bonjour,
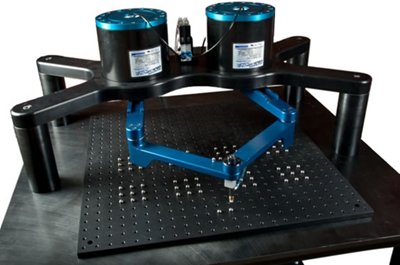
Je réalise un projet dans le cadre de ma dernière année de prépa en TSI où je mets en place une étude du robot DexTAR
DexTAR.jpg
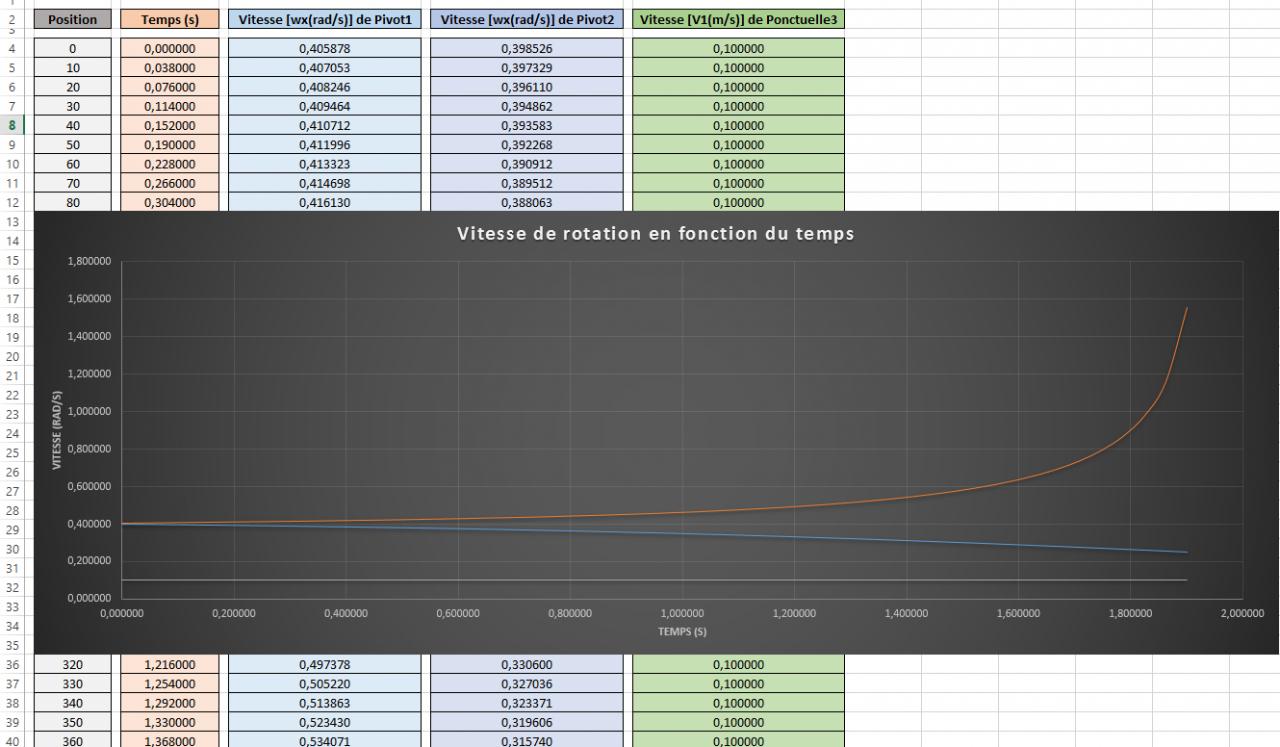
J'ai réalisé l'étude des lois de mouvements mais celles-ci sont compliquées à appliquer sur un robot prototype, j'ai choisi de m'orienter sur un unique mouvement du robot qui est une translation. J'ai réalisé une maquette du robot sous Solidwork que j'ai exploitée avec Meca3d pour obtenir les valeurs suivantes:
Dex12.jpg
Maintenant j'aimerai valider ces mesures par une expérimentation. Pour cela j'utilise 2 servo-moteurs Lego Mindstorm que je lie à une console NXT qui elle même est reliée à Matlab (Simulink) pour relever les vitesses de rotation des 2 servo-moteurs :
ATT_1421660896348_20150119_104054.jpg
Seulement les résultats sont imprécis. J'aimerai augmenter la précision en utilisant de vrais servo-moteurs.. Mais alors comment faire ? Utiliser un servo-moteur avec un capteur de vitesse intégré ? Et comment rajouter les 4 barres reliées par des liaisons pivot à ces servo-moteurs ?
De plus j'aimerai programmer la translation sur le prototypage choisi avec une carte arduino mais comment puis je faire car les vitesses des servo-moteurs sont différentes et de plus celles-ci ne sont pas linéaires. Me faut-il une carte arduino pour chaque servo-moteur et si oui comment faire varier les vitesses des servo-moteurs en fonction des données du tableau.
Je peux apporter plus de précision sur le projet si il vous manque des éléments de réponse.
Merci de votre lecture et de vos réponses
{kind=link}
{kind=link}
{kind=link}
-----