

Madame, Monsieur,
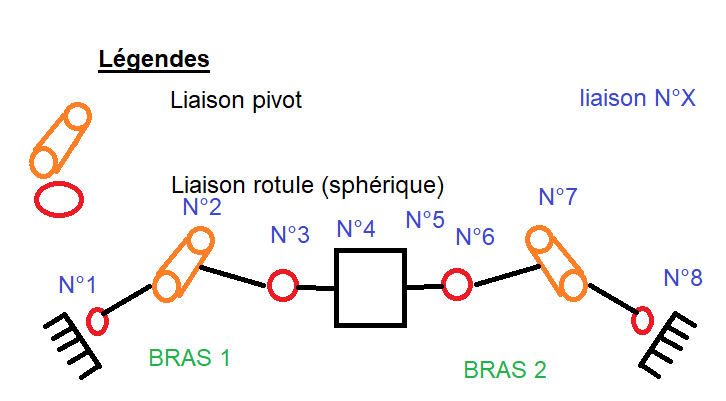
Il y a 2 bras robotisés (BRAS 1 et BRAS 2) qui sont en liaison encastrement (liaison N°4 et N°5) avec un objet.
Dans l'espace (3 dimensions), ce système possède 8 DDL, pouvez-vous me dire pourquoi ? Je comprends bien quand la liaison de la rotule 3 est activée, la liaison rotule 6 "subit" le mouvement( on dit alors qu'elle est contrainte).
Si je comprends bien, lorsque le bras 1 est activé, le mouvement du bras 2 est contraint sauf celui de sa liaison pivot... Pouvez-vous me dire pourquoi lorsque le bras 1 est activé (par des moteurs par exemple), la liaison rotule 8 devient contrainte et pas la liaison 7 ? Pourquoi il y a 8 ddl et non 14 ?
Je vous remercie pour votre attention.
-----