
Bonjour
Je recherche à déterminer le choix d'un motoréducteur, si quelqu'un peut expliquer également la méthode de calcul.
Merci par avance
A+
-----


Bonjour
Je recherche à déterminer le choix d'un motoréducteur, si quelqu'un peut expliquer également la méthode de calcul.
Merci par avance
A+
Pour corser la chose, en rajoutant des paramètres tels qu'une inclinaison exemple de 10° et plus tard une roue (acier crévé..)
J'essaie de comprendre les influences sur le couple du reducteur et la puissance du moteur ces paramètres avec cet exemple théorique,
Merci pour vos lumières,

bonjour,
il faut revenir aux bases de la mecanique, tu vas devoir accelerer et ralentir la charge pour la deplacer, il y aura donc les forces liées à l'acceleration à vaincre (ce sont les seules si on neglige les frottements)
aprés il faudra prendre en compte les frottements et puis enfin une eventuelle inclinaison de la piste.
la premiere des choses à faire est de determiner les accelerations souhaitées.
fred
Wwwaou Fred, Merci.
Simplement pour situer, j'ai casiment ton age, j'ai une base élémentaire d'électricien, (ce n'est pas une excuse
Mais j'aime apprendre..., et ce problème de définition m'obsède presque. Si une demonstration m'est demandée au cours d'un entretien par exemple.
J'aimerais bien resoudre cette définition, certainement hypersimple pour les initiés,
Pourrais-je avoir une aide comme un accès aux formules adéquats étapes après étapes? Nota les valeurs sont là à titre indicatif d'exemple et modifiable.
Bonne soirée,
Bonsoir
Si l'on excepte la phase initiale de montée en vitesse, le couple de sortie est égal au produit du rayon du galet par les forces à vaincre pour faire avancer la charge.
Lorsque la charge se déplace horizontalement, ces forces se résument à la résistance à l'avancement de l'ensemble mobile (frottements mécaniques, résistance aérodynamique, résistance au roulement). Lorsque la charge se déplace sur un pan incliné, il faut y rajouter le produit du poids de l'ensemble mobile par le sinus de l'angle d'inclinaison.
Au niveau du moteur, le couple est égal au couple de sortie multiplié par le rapport de réduction (<1) auquel on doit ajouter le couple correspondant aux pertes mécaniques dans le réducteur. Si le rendement du réducteur dans les conditions d'utilisation est connu, alors le couple du moteur est égal au couple de sortie multiplié par le rapport de réduction et divisé par ce rendement.
La vitesse de rotation du moteur est égale à la vitesse de rotation du galet de sortie divisé par le rapport de réduction.
La puissance mécanique fournie par le moteur est le produit de sa vitesse de rotation par son couple.
Voici un exemple de calcul :
Données :
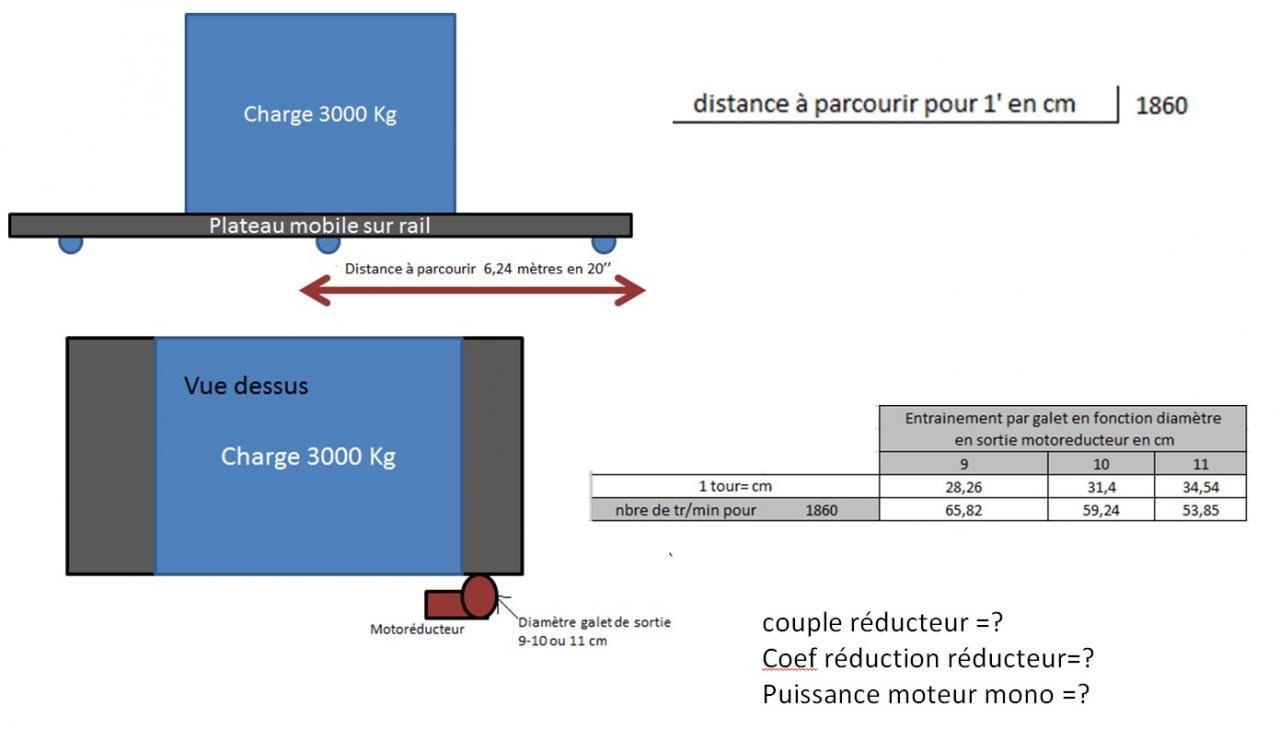
- vitesse de la charge : 1860 cm/min
- diamètre du galet : 10 cm (1 tour = 31,4 cm)
- vitesse de rotation du galet requise : 59,24 tr/min
- forces de frottement pour 1860 cm/min : 20 N
- angle inclinaison : 10° ( sin(10°) = 0,00305 )
- masse de la charge : 3000 kg
- masse du plateau : 50 kg
Calcul :
- somme des forces sur le galet : 20 + 9,81x(3000+50)x0,00305 = 89,64 N
- couple de sortie réducteur : 89,64x10 = 896,4 N.cm
Données :
- vitesse du moteur : 3000 tr/min à la vitesse de synchronisme
Calcul :
- rapport de réduction : 59,24/3000 = 0,01975 (≈1/50) à la vitesse de synchronisme
- rapport de réduction 1/50 pour une vitesse de 2962 tr/min (glissement 2%)
Données :
- rendement estimé du réducteur 1/50 pour la vitesse et le couple de sortie indiqués : 0,9
Calcul :
- couple de sortie moteur : 896,4x(1/50)/0,9 = 19,9 N.cm
- puissance mécanique développée : 19,9x2962x(2π/6000) = 61 W
Bonjour,
la base ce sont les lois de newton,
http://www.phy6.org/stargaze/Fnewton.htm
tu peux te contenter juste de cela si tu negliges les frottements
l'autre probleme que tu vas rencontrer dans ton "exercice" c'est la definition de la courbe de vitesse que ton mobile va devoir avoir
si on se refere aux lois de newton , dans la premiere phase, quand tu vas accelerer la charge, il va te falloir pousser dessus (lui fournir de l'energie) dans la deuxiemme phase tu vas devoir freiner pour terminer arreté
de la valeur de l'acceleration calculée va dependre la force avec la quelle tu vas devoir pousser (ou freiner). Cette force multipliée par la vitesse va te permettre d'acceder à la puissance necessaire
La dessus il va te falloir rajouter les frottements et la pente qui eux vont s'exprimer par une force (qui est supposée constante)
la force de frottement (ou de roulement) est toujours opposée au sens du mouvement, elle est souvent calculée comme étant une fraction du poids, par exemple sur une voiture , la force necessaire pour la faire avancer sur du plat (sans tenir compte de l'aerodynamisme) est de l'ordre de 2 % de son poids dans le cas d'un roulement acier sur acier c'est plutot moins
Quand il y a une pente il y a aussi une autre force constante (si la pente est constante) qui auras toujours tendance à faire descendre la charge (pour la calculer c'est un peu de trigonometrie (je sais c'est un truc barbare)
Au final tu ajoutes toutes ces forces dans les divers cas de figures, cela te permet de calculer les caracteristiques minimales de ton moto reducteur
mais pour en arriver au motoreducteur, il manque encore pas mal de données telles que le diametre des roues, la transmition etc....
Cependant à l'aide de ces premieres lois (lois de Newton) tu peux deja avoir une idée de la puissance minumum necessaire
commences déja par cela et on en reparle aprés si tu veux
fred
Oups... J'ai fait une grosse erreur de calcul dans la première ligne (mais le principe reste correct). Il donc faut lire :
- somme des forces sur le galet : 20 + 9,81x(3000+50)x0,00305 = 111,3 N
- couple de sortie réducteur : 111,3x10 = 1113 N.cm
...
- couple de sortie moteur : 1113x(1/50)/0,9 = 24,7 N.cm
- puissance mécanique développée : 24,7x2962x(2π/6000) = 76,7 W
Bonjour,
on a avec PA5CAL des approches inverses mais pas incompatibles, il calcule plutot ce que je negliges dans un premier temps et negliges ce que je commence par calculer
si on doit faire 6 m en 20" cela donne une vitesse moyenne de 0.3 m/s
pour obtenir cette vitesse moyenne avec une acceleration et un freinage il faut une vitesse maxi de 0.6 m/s et cette vitesse est atteinte au bout de 10 secondes
soit une acceleration de 0.06m/s²
en applicant les lois de newton il faut exercer une force de F = masse * acceleration = 3000 * 0.06 =180 N
la puissance maximum demandée au moteur pour l'acceleration sera quand on ira à la vitesse maxi (0.6 m/s)
on aura donc une puissance de 180*0.6 = 108 watts qu'il faudra bien évidement rajouter aux 61 watts trouvés par PA5CAL
fred
re,
Les conclusions de ces calculs sont multiples, si on cherche a avoir l'acceleration minimum, les moteur va en permanence travailler trés loin de la vitesse de synchronisme avec un rendement pas bon etc.. il faut donc utiliser un variateur
si on ne veut pas utiliser de variateur, il va falloir accelerer plus fort pour ne pas rester trop longtemps avec un glissement important et donc recalculer l'acceleration pour que celle ci ne dure par exemple qu'une seconde, il faut alors installer un moteur beaucoup plus gros (pour une question de puissance et pour une question de résistance mécanique du reducteur)
Aprés, c'est plus un probleme d'electrotechnique de choix de moteur en fonction du nombre de demarrage par heure etc....
fred
tu auras ici
http://www.cnr-cmao.ens-cachan.fr/au...NO/151-p46.pdf
un certain nombre d'éléments de réponses concernant le choix du profil de vitesse qui va determiner finalement la puissance de ton moteur
fred
Merci à Tous!! quelle emulation je suis agéablement étonné. Le variateur est l solution à pas mal de problème notement pour fournir du tri a partir du mono, les paramètres d'accélération ralentissement, et meme le couple est paramétrable à + de 110% par exemple.
jJe vais réfléchir sans cet appareil miracle et reprendre TOUTES vos explications, allez j'imprime tous cela et tacher de comprendre en bossant sur tableur, créant ainsi une interactivité (basique) selon les paramètres.
Bonne journée à tous!!!!!!
n'hesites pas à poster tes résultats et surtout tes formules pour pouvoir les valider et si besoin les corriger
fred
Merci Fred, justement j'en suis à la méthose de Pascal, je bloque sur certain point sur le tableur mais j'avance, je ferais ensuite un autre tableau avec ta méthode.
Hello,
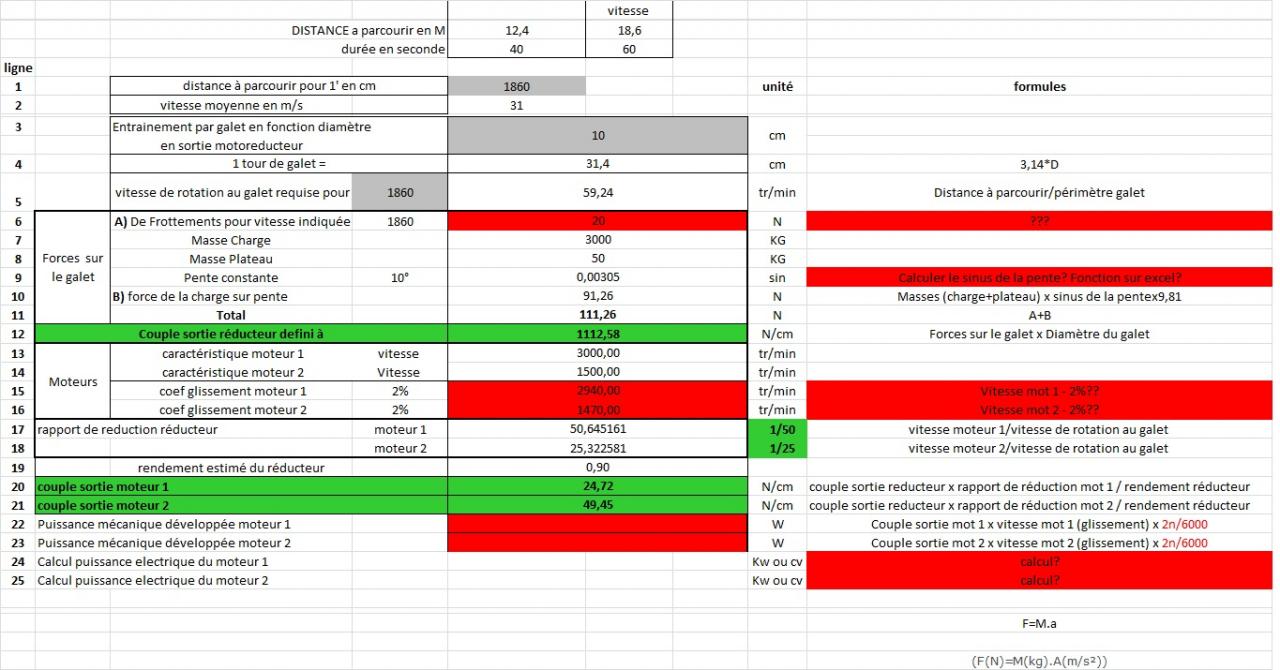
Voici ma synthèse, en rouge ça coince notament le calcul de la vitesse en prenant en compte le glissement, je ne trouve pas le même chiffre avec -2% en L 15 et16 que Pascal.
Formule pas bonne je pense idem en L22 et 23, à quoi correspond le 2N/6000 pour la puissance mécanique développé
Comment passer ensuite à la puissance éléctrique du moteur?
définition d'un type de motoréducteur.jpg
Ce soir je part par l'autre bout avec les ...accélérations
Manu
Hello,
Voici ma synthèse, en rouge ça coince notament le calcul de la vitesse en prenant en compte le glissement, je ne trouve pas le même chiffre avec -2% en L 15 et16 que Pascal.
Formule pas bonne je pense idem en L22 et 23, à quoi correspond le 2N/6000 pour la puissance mécanique développé
Comment passer ensuite à la puissance éléctrique du moteur?
Ce soir je part par l'autre bout avec les ...accélérations
Manu
Exact, ça ne correspond pas à un glissement de 2%. Deuxième erreur de calcul de ma part, désolé.Envoyé par KEOPS38

Mais ne fais pas attention aux valeurs, ni même à leur ordre de grandeur (en pratique, le glissement du moteur mono sera plus important et le rendement du réducteur sera plus faible).
Mon exemple n'est là que pour illustrer les formules dont j'ai parlé juste avant. Par ailleurs, ce que j'ai exposé n'est pas une méthode de dimensionnement, mais seulement un moyen d'obtenir les valeurs nécessaires à ces méthodes, lesquelles dépendent avant tout des possibilités et contraintes du projet (tolérances sur les valeurs requises, disponibilité des moteurs et des réducteurs, possibilité de pilotage par variateur électronique, etc.).
Il s'agit de π (pi) et non pas N. π = 3,14159...
Le coefficient 2π/6000 correspond à la conversion des unités de N.cm.tr/min en W (=N.m.rad/s)
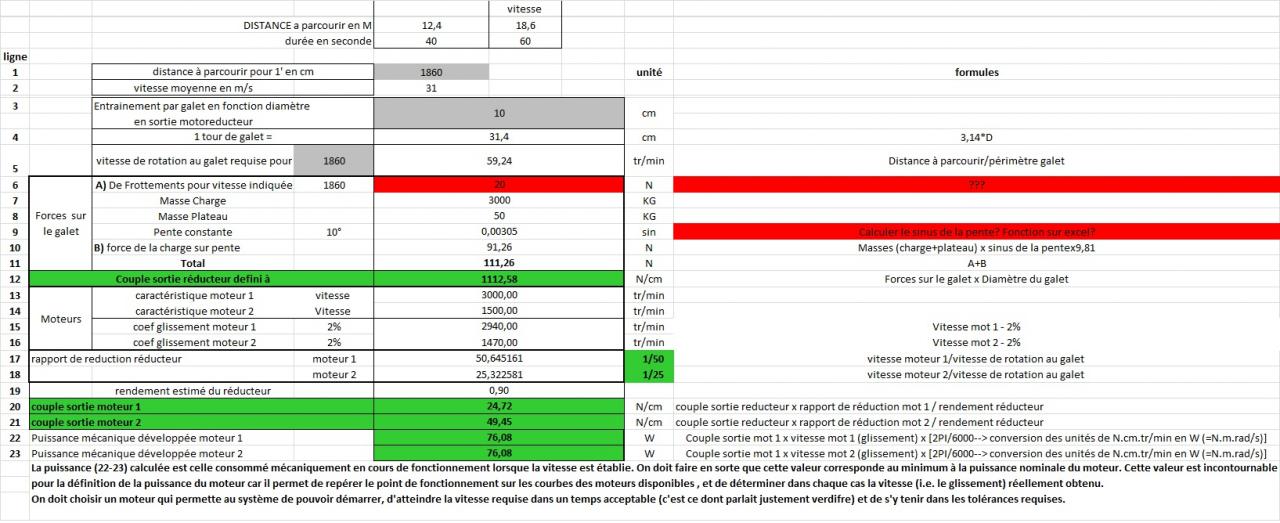
La puissance calculée est celle consommé mécaniquement en cours de fonctionnement lorsque la vitesse est établie. On doit faire en sorte que cette valeur corresponde au minimum à la puissance nominale du moteur.
En fait, son calcul permet de repérer le point de fonctionnement sur les courbes des moteurs disponibles au catalogue, et de déterminer dans chaque cas la vitesse (i.e. le glissement) réellement obtenu.
Au final, on doit choisir un moteur qui permette au système de pouvoir démarrer, d'atteindre la vitesse requise dans un temps acceptable (c'est ce dont parlait justement verdifre) et de s'y tenir dans les tolérances requises.
Ok Merci revu, pour l'erreur du -2% de glissement je pensais plutot que j'avais raté un truc, j'ai tourné 100 fois l'opération. Mais un exemple avec des chiffres on s'approche de la réalité.
Je trouve la meme puissance mécanique que ce soit pour moteur 1 ou 2, La puissance est identique à 3000 ou 1500 tr/min.
Je choperais un catalogue pour voir ce que cela donne en pratique. Pour la ligne 10 concernant le "frotement à vitesse indiquée", tu as une info stp pour la valeur 20N
J'attaque Newton voir...
Manu
Avec les lois de Newton
voici mes résultats:
Des questions:
-comment fais-tu pour trouver 10" en ligne 28? la masse sur une pente? (précédement calculé en N, et là besoin de la masse en Kg pour calculer F=M*A)
Le résultat donne 193 W de puissance mécanique. Idem il faut consulter les courbes caractéristiques des moteurs?
Est ce normal si dans ce cas, on ne parle pas de reducteur avec les lois Newton?
Admettons une transmission à galet simple (10cm) hyper adhérent, ou à crémaillère peut-on avancer dans la définition du motoréducteur en vrai
Au fait, le réducteur est défini en parti 1 non? on a le couple en sortie de boite, rapport de réduction??
Autre question, si nous posons 10 motoréducteurs sur cet exemple (ok pas terrible économiquement), quelles sont les paramètres déjà calculés qui seront divisés par 10 si proportionnel?
Couples ? puissance mécaniques?
a+
Manu
Bonjour,
je ne suis absoluement pas d'accord, pour moi il faut considerer la puissance crete en fin d'acceleration.La puissance calculée est celle consommé mécaniquement en cours de fonctionnement lorsque la vitesse est établie. On doit faire en sorte que cette valeur corresponde au minimum à la puissance nominale du moteur.
Si on a un moteur qui à sensiblement comme puissance nominale la puissance necessaire à vitesse stabilisée l'accélération sera trés faible (trop faible) et le moteur ne survivra peut être pas à son premier démarage
les phases transitoires (surtout sur des deplacements courts 20 secondes) sont primordiales pour le dimensionnement, selon la courbe de vitesse choisie, si il y a une vitesse stabilisée le moteur doit alors se "balader"
le dimensionnement d'un moteur asynchrone en démarage direct pour ce genre d'application est vraiment un probleme délicat
Si on veut rester dans des calculs simples, il faut soit passer au variateur de vitesse soit au servomoteur. Quand on va detailler le calcul, on va se rendre compte qu'en plus des inerties de translation il faudra prendre en compte des inerties de rotations qui sont souvent non negligeables
De plus ici et avec un pilotage direct du moteur asynchrone on aborde absoluement pas le probleme du freinage et de son controle
Pour avoir realisé un certain nombre de chariots navettes j'ai toujours utilisé un variateur pour la commande (de préférence vectoriel de flux) et un moteur calculé avec la puissance crete theorique et un coeff de securité d'au moins 3. démarer et arreter le chariot n'est pas tout, il faut aussi gerer sa position d'arret, cela se fait generalement par une approche à faible vitesse et un frein
Pour moi, c'est un probleme de dynamique et il faut l'aborder comme tel en définissant en premier la loi de vitesse à appliquer
fred
Je ne pense pas avoir suggéré autre chose, ou alors je me suis mal exprimé.
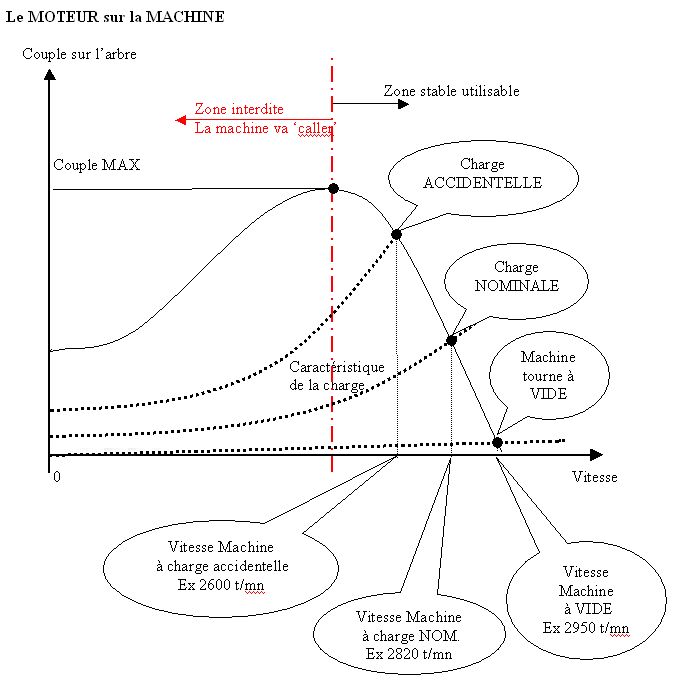
La puissance calculée est celle développée en fin d'accélération (i.e. lorsque la vitesse est établie), et la puissance nominale fournie par le moteur doit lui être au moins supérieure (sur la courbe que j'ai donnée plus haut, le point de fonctionnement doit se situer entre « Machine tourne à VIDE » et « Charge NOMINALE »).
Il ne s'agit que d'un des critères de dimensionnement, et comme je l'ai clairement indiqué, la réalisation des phases transitoires en sont un autre.
Bonjour
Un variateur de vitesse gère tous ces paramètres d'accélération, decelleration, et la vitesse freinages à partir de quand, donc asservissements associés.
Comme il donne une souplesse dans le dimensionnement incontestable, j'entend par là qu'un surdimensionnement du réducteur et du moteur ne cause pas problème (hormis le cout) mais dans la fonctionnalité souhaité le variateur rattrapera pas mal de chose, c'est bien sur une solution incontournable.
Sinon les premiers calcul part 1 et 2 sont utiles ou pas?
Manu
Bonjour,
pour moi, pour dimentionner une motorisation il faut avant toute choses connaitre deux parametres qui sont l'accélération maximale et la vitesse maximale. Ces deux parametres sont liés.
On peut le voir dans ton exemple, si on cherche à avoir l'acceleration maximale la plus faible possible, on va devoir accelerer pendant 10 seconde et freiner pendant 10 secondes, et on aura une vitesse maximale de sensiblement 0.6 m/s. C'est ce que l'on appelle une loi de vitesse triangulaire
Si on pouvais obtenir une acceleration infinie, on aurait alors une vitesse maximale de 0.3 m/s. C'est ce que l'on appelle une loi de vitesse rectangulaire
voir la page 3 de ce document
http://www.cnr-cmao.ens-cachan.fr/au...NO/151-p46.pdf
Dans ce document, il est aussi fait largement mention d'une loi de vitesse en trapeze de type 1/3 1/3 1/3 qui possede entre autres avantages celui de minimiser la puissance necessaire
Pour moi, avant de faire le moindre calcul "pratique" il faut au minimum avoir determiné la vitesse maxi (ce qui nous donne aussi l'acceleration maxi)
Ces deux valeurs te permettent de determiner la puissance maxi demandée à ton moteur à l'aide des lois de Newton et des frottements (et des rendements) ainsi que le rapport de reduction necessaire
c'est cette determination qui conditionne tout le reste de l'étude
Il ne faut pas oublier que la gestion de la phase d'arret est souvent beaucoup plus délicate que celle de demarage, on est souvent astreint à s'arreter à un endroit précis, ceci impose le plus souvent une phase d'accostage réalisée à faible vitesse
lors de cette phase, on parcoure généralement une faible distance que l'on peut souvent negliger, par contre il ne faut pas negliger sa durée
si ta phase d'accostage dure 2 secondes, il te restes 18 secondes pour faire le mouvement
si tu choisi une loi trapezoidale en 1/3 1/3 1/3 il te faut accelerer pendant 6 secondes être à vitesse constante pendant 6 secondes et decelerer pendant 6 secondes
calculer les accelerations et les vitesses menne à des equations un petit peu complexes, cependant il existe une methode à moitié graphique simple pour calculer tout cela. Cette methode est basée sur un calcul de surfaces
Le principe est le suivant
la relation de base est que la distance parcourue est egale à la vitesse multipliée par le temps
si tu traces sur un papier une belle loi en trapeze de type 1/3 1/3 1/3 representant la vitesse en fonction tu temps, la distance parcourue sera egale à la surface sous le trapeze
tu peux verifier cela en tracant une loi rectangulaire, c'est à dire vitesse constante de 0.33m/s pendant 18 secondes tu vas trouver en calculant la surface de ton rectangle 6m
si on prends une loi triangulaire qui par de 0m/s qui atteint 0.66 m/s au bout de 9 secondes et qui redescend à 0m/s au bout de 18 secondes, tu vas calculer la surface du triangle qui est base * hauteur/2 tu vas encore retrouver 6m
si maintenant on prends une loi en trapezedont on ne connait à priori que peu de choses
on sait que la vitesse va être croissante pendant les 6 premieres secondes puis constante pendant les 6 secondes suivantes et enfin decroissante pendant les six dernieres secondes
et on sait que l'on désire que la distance parcourue soit 6 m
alors, on pourrait essayer de se rappeller des formules de calcul de surface des trapezes mais il y a encore plus simple
quand on regarde notre beau trapeze, on peut se dire qu'il est composé d'un premier triangle, suivi d'un rectangle et terminé par un dernier triangle
Les deux triangles ont la même allure, on peut prendre celui de droite, le retourner et le mettre sur celui de gauche, cela fait toujours la même surface
On a maintenant un beau rectangle qui fait 12 secondes de long mais dont on ignore la hauteur. Cependant, on sait que sa surface fait "6 metres" (je sais au debut c'est bizare une surface en metres)
on en deduit donc la vitesse qui est 6m/12secondes = 0.5 m/s
Au passage, on vient quand même de faire une operation mathematique complexe qui s'apelle une integrale
Donc on connait maintenant la vitesse maxi à atteindre et on sait que cette vitesse doit être atteinte en un certain temps
ce temps on l'a choisi lors du choix de la loi de vitesse, on accelere donc pendant 6 secondes
on doit atteindre 0.5m/s en 6 secondes on doit donc accelerer de 0.083 m/s par seconde. Cela se se note 0.083m/s²
On a donc maintenant les deux valeurs indispensables pour continuer le calcul. Bien sur pour determiner ces valeurs j'ai fait des choix
1) choix de la loi de vitesse, tu peux en choisir une autre
2) choix d'une phase d'accostage et de sa durée
les choix peuvent être guidés par d'autres considerations tels que vitesse maxi limitée (freinage d'urgence en cas d'obstacle sur le parcours) , acceleration limitée par la stabilitée de la charge transportée , accélération limitée par l'adhérence etc....
Selon la precison d'arret demandée la gestion de la phase d'arret peut être fondamentalement différente si c'est au mm ou à 10cm pres ce n'est pas le même probleme.
fred
Thanks Fred
Je vais analyser cela...
Tu ne ferais pas du Freelance par hasard? Je sais qu'il y a des Université/IUT qui aident les "extérieurs", Je n'ai pas tout saisi à la première lecteur, mais je ne désespère pas arriver à un % honorable de compréhension sur les suivantes
mais en tout cas merci
Manu
bonjour,
ce forum n'est pas le lieu pour discuter de cet aspect, mais pour te répondre, cela peut m'arriver, ayant peu de besoins, je ne court pas après et je ne négocie jamais mes tarifsTu ne ferais pas du Freelance par hasard?
sur cet aspect, il faut impérativement avoir tout compris pour dimensionner correctement un moteur travaillant dynamiquement. Aprés les aspects technologiques du dimentionnement sont un peu moins cruciaux, on peut souvent considerer l'ensemble moteur + variateur comme une boite noire dont on connait juste quelques parametres. Il n'est pas toujours indispensable de rentrer precisément dans le fonctionnement de telles ou telles technologie. Elles peuvent pour beaucoup s'approximer par un moteur à courant continu ideal muni de quelques defautsJe n'ai pas tout saisi à la première lecteur, mais je ne désespère pas arriver à un % honorable de compréhension sur les suivantes
Il y a une exeption notable, c'est le moteur asynchrone en pilotage direct ou l'on doit vraiment souvent rentrer dans le detail.
fred
Quand je dis que le variateur régle pas mal de carences technique, c'est à dire que l'on peut s'affranchir de précision.Je ne la considère pas comme une boite noire, bien au contraire que du bien.
Le - c'est dans le cadre d'une industrialisation de procédé que cet outil peut etre de trop pour des raisons d'encombrement/coût,
tiens 1 exemple/ les automatismes pour portails coulissants, j'ai installé le mien il y a quelques années. Du plug and play, pas de variateur mais un motoréducteur dimensionné pour une charge donné maxi de xx.
Je vais jeter un oeil demain au salon Siane pour voir ce qu'il se fait actuellement, à mon retour je me repenche là dessu merci pour ton expérience encore
Bonjour,
pour une application industrielle le variateur n'est pas cher, surtout qu'il remplace pas mal de choses ( les variateurs modernes integrent pas mal de fonctions annexes). pour des applications grand public , je ne me prononcerai pas, je les connais mal et on utilise souvent les moteurs dans des conditions bizarres, les durées de vie sont faibles etc....Quand je dis que le variateur régle pas mal de carences technique, c'est à dire que l'on peut s'affranchir de précision.Je ne la considère pas comme une boite noire, bien au contraire que du bien.
Le - c'est dans le cadre d'une industrialisation de procédé que cet outil peut etre de trop pour des raisons d'encombrement/coût,
fred



{kind=link}