


D'accord pour la précision au centième.Envoyé par Tifoc

Pourriez-vous mieux expliquer le premier point que j'ai cité, s'il vous plait? Je n'ai pas bien compris ce que vous voulez dire
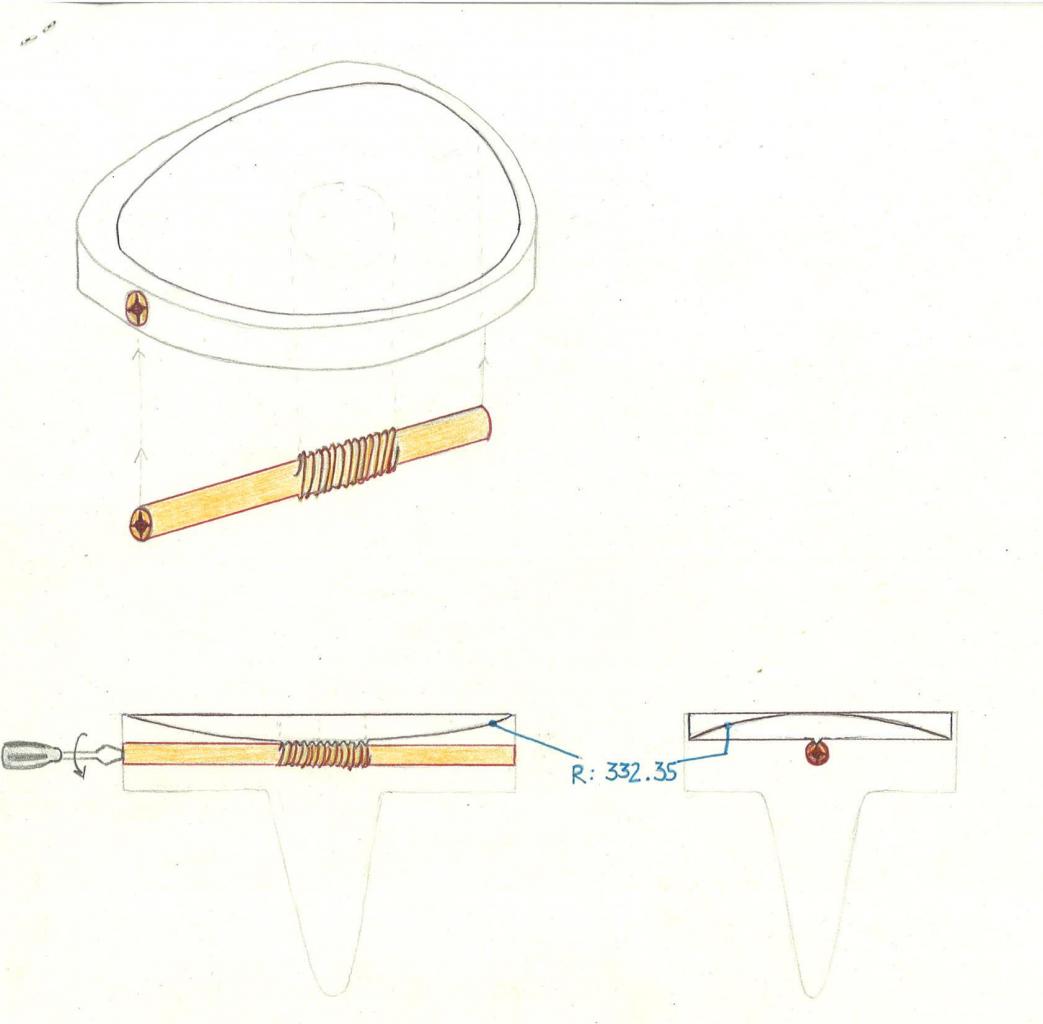
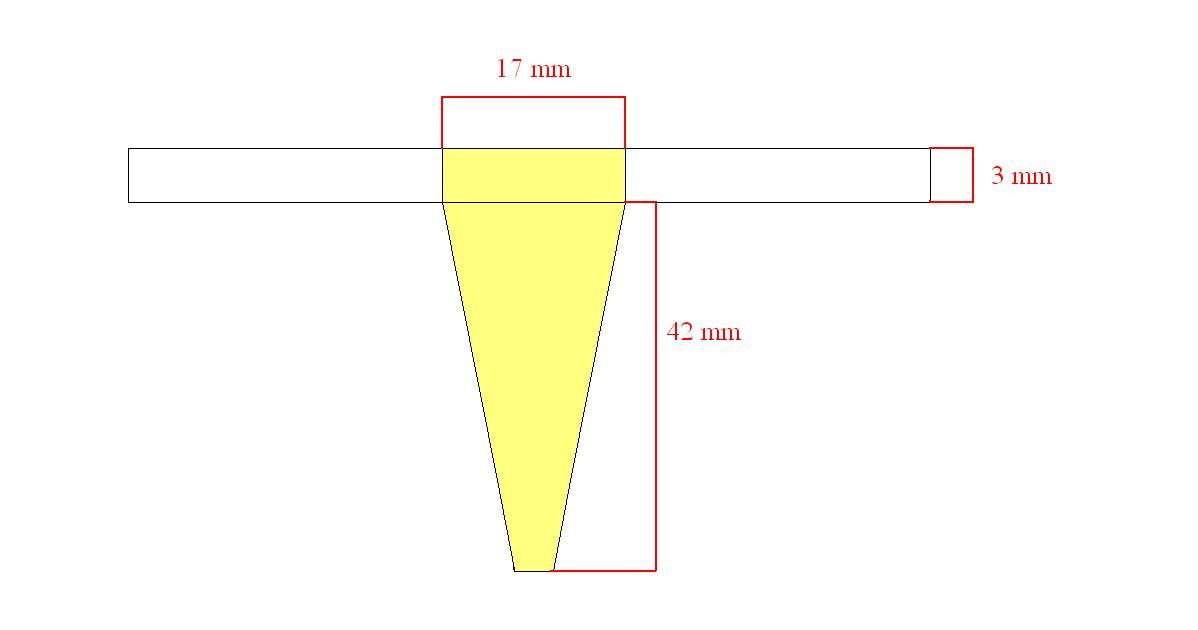
effectivement j'ai du mal à l'imaginer, moi aussi! J'ai approximé les dimensions des composants avec un rectangle, les composants ont des formes bien plus ergonomiques et jolies
Merci encore de votre collaboration
 )
)
-----

 Donc je veux bien aborder le problème et apprendre tout ce qu'il faut, ça prend du temps mais on est là pour ça
Donc je veux bien aborder le problème et apprendre tout ce qu'il faut, ça prend du temps mais on est là pour ça 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}