
Répondre à la discussion

Affichage des résultats 1 à 28 sur 28
2 courbe comment expliquer ?
- 29/04/2017, 11h24 #1invite030bc038
2 courbe comment expliquer ?
------
- 29/04/2017, 12h10 #2Mecanik77
Re : 2 courbe comment expliquer ?
Bonjour,
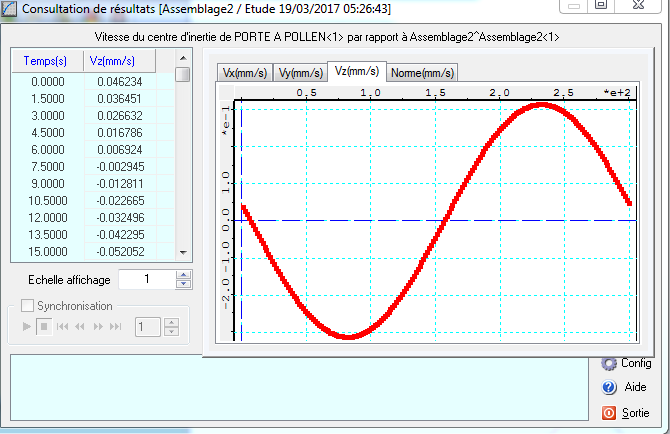
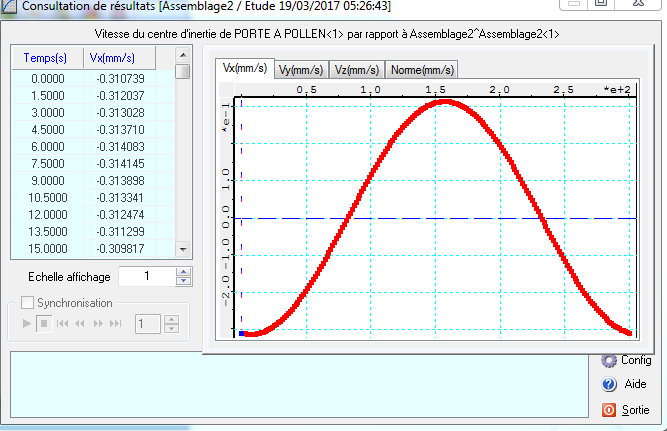
Ce sont deux courbes différentes, une la composante en X et l'autre la composante en Z de la vitesse.
Il y a manifestement un aller-retour sur la période considérée.
La vitesse du servomoteur en cm/s??? Ce servomoteur se déplace?
Essayez d'être plus précis.

- 29/04/2017, 14h23 #3invite030bc038
Re : 2 courbe comment expliquer ?
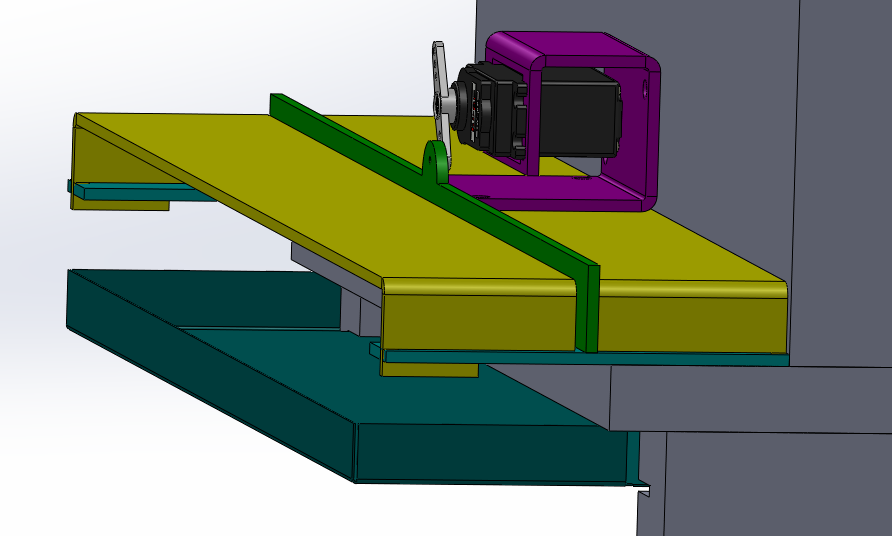
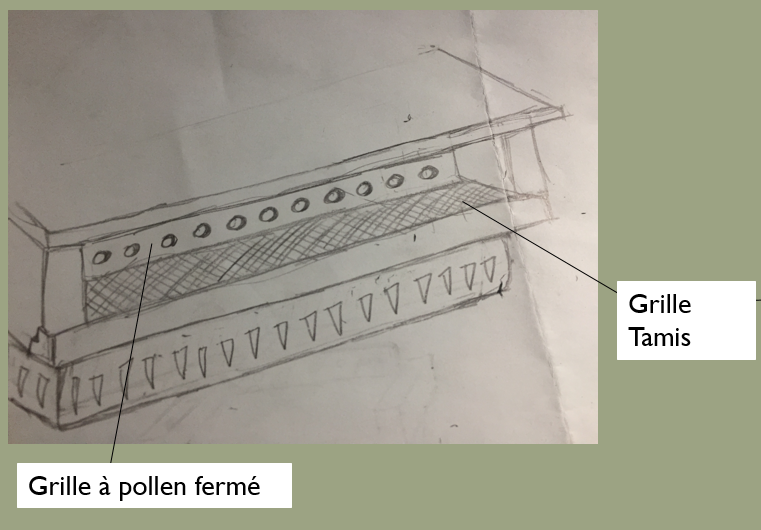
Le servomoteur fait tourner une grille à pollen en translation donc comme une la roue dans un parc attraction
- 29/04/2017, 14h27 #4invite030bc038
Re : 2 courbe comment expliquer ?
Je ne sais pas si vous visualisez ce que je dit, le servomoteur et fixe et la grille à pollen n'est pas fixé donc il y a un mouvement de translation
- Aujourd'huiA voir en vidéo sur Futura
- 29/04/2017, 14h33 #5invite030bc038
Re : 2 courbe comment expliquer ?
Dans le cahier des charges il me dissent que la vitesse du servomoteur ne doit pas dépasser les 1cm/s donc je ne sais pas comment justifier avec ce graphique
- 29/04/2017, 14h51 #6Mecanik77
Re : 2 courbe comment expliquer ?
Il faut être plus précis, je ne comprends rien.Le servomoteur fait tourner une grille à pollen en translation
Une vitesse de rotation se mesure en rad/s (ou tr/min) mais pas en cm/s.
- 29/04/2017, 15h01 #7tchitchou
Re : 2 courbe comment expliquer ?
Salut,
Ben, pour l'instant.. faut avouer, c'est moyennement clair. Envoyé par Blockmane
Envoyé par Blockmane 
Aide-nous à t'aider, et fais-nous des dessins. Qui bouge comment ?
Servomoteur classique, ou continu ?
- 29/04/2017, 16h02 #8invite030bc038
Re : 2 courbe comment expliquer ?
bac à pollen.PNG donc voici des images
assemblage finish.PNG donc le servomoteur doit tourner comme une roue
- 29/04/2017, 16h05 #9invite030bc038
Re : 2 courbe comment expliquer ?
Les vitesses des pièces en mouvements par rapport au bâti ne doivent pas dépasser 1 cm/s.
- 29/04/2017, 16h08 #10tchitchou
Re : 2 courbe comment expliquer ?
En attendant de pouvoir voir les pj,
"comme une roue" qui tourne continument ?
Ou sur 180° seulement ?
Les experts finiront par demander une référence, d'ailleurs..
Et on est d'accord que le cm/s ne s'applique qu'aux translations ?
- 29/04/2017, 16h23 #11invite030bc038
Re : 2 courbe comment expliquer ?
référence du servomoteur : Futaba s3003
Oui le cm/s s'applique que au translations
Donc La grille doit avoir deux positions : en place et ouvert
donc sa veut dire 90 degrés et redescendre a sa place initiale Capture.PNGdqzdzqdzqdqzd.PNG
- 29/04/2017, 17h18 #12tchitchou
Re : 2 courbe comment expliquer ?
Bon, ok, le contexte est bien plus clair.
(hors sujet, mais la cinématique me semble pas mal, pas de risque de blocage..)
Quelle est LA (ou les, hein..) question ?
- 29/04/2017, 17h45 #13invite030bc038
Re : 2 courbe comment expliquer ?
Les vitesses des pièces en mouvements par rapport au bâti ne doivent pas dépasser 1 cm/s. je dois valider sa mais je ne sais pas comment faire :/
- 29/04/2017, 17h50 #14mécano41

Re : 2 courbe comment expliquer ?
Bonjour,
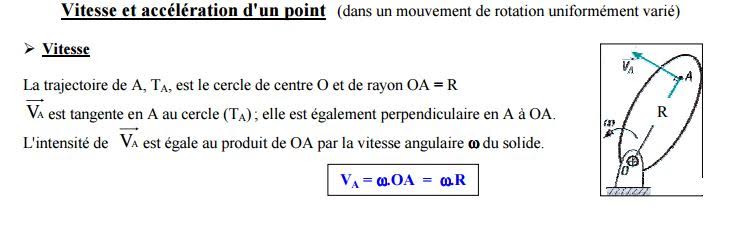
Le système produit une translation circulaire, c'est-à-dire que la grille rectangulaire est mise en mouvement par un bras tournant de rayon R. Elle reste parallèle à elle-même (dans ton système, je ne sais pas comment). Si L'axe X est horizontal et l'axe Z vertical, tous les points de cette grille décrivent un cercle de rayon R décalé en X et Z par rapport au cercle du bras.
Si la vitesse angulaire du bras est , la vitesse tangentielle à la liaison avec la grille est
, la vitesse tangentielle à la liaison avec la grille est
A l'instant t, tu auras pour la vitesse horizontale :
et pour la vitesse verticale :
Ce sont les deux composantes de la vitesse représentées, semble-t-il, par tes courbes.
Cordialement
- 29/04/2017, 18h22 #15invite030bc038
Re : 2 courbe comment expliquer ?
Mais comment je peux expliquer sa sa a l'air très compliqué :/
- 29/04/2017, 18h24 #16invite030bc038
Re : 2 courbe comment expliquer ?
il a donc pas de calcul a faire ?
- 29/04/2017, 18h34 #17Zozo_MP
Re : 2 courbe comment expliquer ?
Bonjour à tous
Voilà ce que je comprend.
Il s'agit d'un servomoteur utilisé dans le modélisme qui bouge selon un certain débattement en général inférieur à 180° (cela dépend des modèles)
Donc bien que cela ne ce voit pas sur la Vue 3D il doit y avoir une lumière oblongue sur une partie de la pièce palonnier qui est fixée sur l'axe du servomoteur, sinon rien ne bougera.
On ne sait pas d'où sort cette courbe est-ce celle des spécifications du servomoteur ou d'autre chose comme une simulation sous Motion du montage du Logiciel de CAD 3D par exemple
Ce qui est certain c'est que vu le montage la vitesse de déplacement de la pièce verte ne sera pas linéaire.
De plus je ne vois pas à quoi sert de vouloir comparer les deux courbes vu que tout le déplacement se fait dans un seul plan. La pièce verte ne bouge que dans le plan X par exemple. A moins quelle ne bouge aussi en Y
Là aussi l'effort sur le moteur ne sera pas linéaire. La courbe d'effort sera importante au début et à la fin du mouvement et au minimum lorsque le palonnier passera à la verticale.
Bref un peu plus de précision serait le bien venu au vue des questions qui se posent.
CordialementDernière modification par Zozo_MP ; 29/04/2017 à 18h38.
Faim dans le monde. Ne laissez de contributeur "sur leur faim", informez nous
- 29/04/2017, 18h43 #18Zozo_MP
Re : 2 courbe comment expliquer ?
Bonsoir
Compliqué !
sauf si vous nous faites voir la cinématique exact de la pièce verte et que vous nous fassiez voir le palonnier qui fait bouger la pièce verte (a-t-il un trou oblong ou non)
Je vois que je ne comprend pas tout à fait la même chose que mécano41. Ce qui nempêche que ce que dit mécano41 est tout à fait exact selon ce qu'il voit et que je comprend.
CordialementFaim dans le monde. Ne laissez de contributeur "sur leur faim", informez nous
- 29/04/2017, 18h47 #19invite030bc038
Re : 2 courbe comment expliquer ?
ce que dit Mecano41 est exactement se
 que je cherche
que je cherche
- 29/04/2017, 18h59 #20Zozo_MP
Re : 2 courbe comment expliquer ?
Bonsoir
Je m'auto répond car je n'ai pas été clair
Soit la pièce verte ne glisse que de gauche à droite dans la plan X. Auquel cas il faut un trou oblong sur le palonnier (ce qui est peu probable vue la taille).
Soit la pièce verte glisse de gauche à droite sur le plan X et monte et descend sur le plan Y.
Dans ce cas pas de trou oblong sur le palonnier ce qui est plus que probable. Dans cas la pièce verte décrit un arc ou un demi arc.
Le mouvement latéral est égale à la corde et le mouvement de haut en bas est égal à la flèche. Ou alors un demi arc avec donc une demi corde la flèche restant inchangée
C'est une autre façon de décrire le mécanisme avec là encore deux hypothèses.
Donc comme dit précédemment il faudrait connaitre la cinématique exacte.
On n 'ai pas payé cher mais on se marre bien Faim dans le monde. Ne laissez de contributeur "sur leur faim", informez nous
Faim dans le monde. Ne laissez de contributeur "sur leur faim", informez nous
- 29/04/2017, 18h59 #21invite030bc038
Re : 2 courbe comment expliquer ?
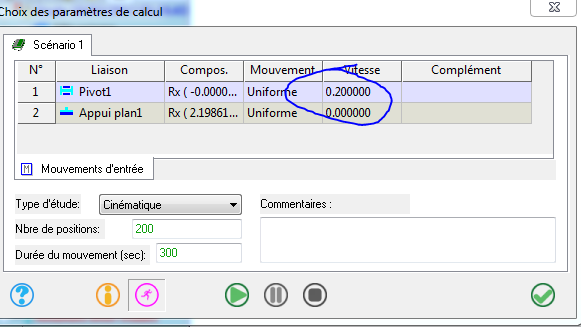
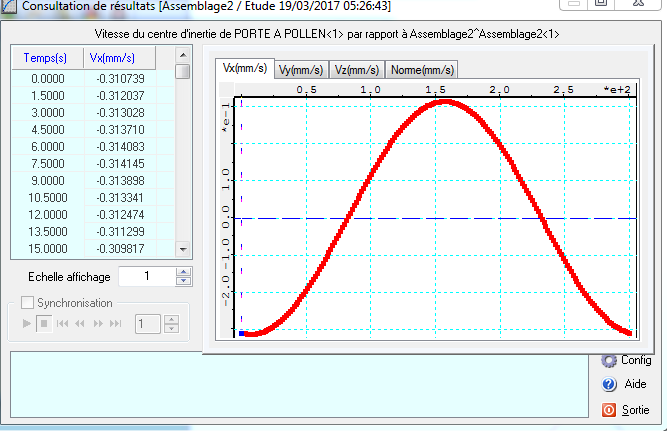
donc pour le graphique je sais comment expliquer, je regarde la vitesse en x ou en Y (ou la norme) on constate que la vitesse du servomoteur est inférieur à 1cm/s donc cahier des charges respectés avec vitesse de sortie servomoteur = à 0.2 tr/mn(celle rentrée dans la pivot 1 voir ta première fig envoyée.) ce qui très lent.
- 29/04/2017, 19h06 #22invite030bc038
Re : 2 courbe comment expliquer ?
https://drive.google.com/drive/u/0/my-drive vous pouvez voir la vidéo ?
- 29/04/2017, 19h15 #23Zozo_MP
Re : 2 courbe comment expliquer ?
Bonsoir
est-ce que vous êtes certain du lien de partage. en général c'est plus long avec un longue liste de caractères abscons
CAr je ne vois pas la vidéo que vous envoyez.
CordialementFaim dans le monde. Ne laissez de contributeur "sur leur faim", informez nous
- 29/04/2017, 19h23 #24invite030bc038
Re : 2 courbe comment expliquer ?
https://www.youtube.com/watch?v=ImPw...ature=youtu.be voici la vidéo !
- 29/04/2017, 19h45 #25Zozo_MP
Re : 2 courbe comment expliquer ?
Bonsoir
Merci avec la vidéo la cinématique est claire.
Cordialement
Ca fait un peu guillotine à abeille NOOOOOoonnn Pas taper la tête
NOOOOOoonnn Pas taper la tête  trop tard je suis déjà loin
Faim dans le monde. Ne laissez de contributeur "sur leur faim", informez nous
trop tard je suis déjà loin
Faim dans le monde. Ne laissez de contributeur "sur leur faim", informez nous
- 29/04/2017, 21h05 #26invite030bc038
Re : 2 courbe comment expliquer ?
merci a vous !:
- 30/04/2017, 07h46 #27mécano41
Re : 2 courbe comment expliquer ?
Info. complémentaire, si nécessaire :
Dans les conditions que j'ai indiquées, c'est-à-dire avec des vitesses Vx et Vz en quadrature (sinusoïdes déphasées de pi/2), on peut voir que Vt = racine(Vx²+Vz²) = constante
Si tu fais cette même opération avec des valeurs de Vx et Vz prises dans tes tableaux, au même temps t, tu as toujours également une vitesse constante, celle du servomoteur (à quelques décimales près...). Cette vitesse, appliquée à la grille est la plus élevée ; donc la vitesse de rotation du servomoteur ,ne doit pas dépasser :
en radians/s pour R en m et Vtmax en m/s (ici Vtmax = 0,010)
Cordialement
- 03/05/2017, 14h13 #28le_STI
Re : 2 courbe comment expliquer ?
Bonjour à toi aussi. Envoyé par Blockmane
Regarde l'axe des ordonnées : la valeur maximale affichée est +/-3. En étant attentif, on remarque que ce sont des dixièmes (*e-1) et que l'unité est le mm/s, tu as donc encore de la marge avant d'atteindre les 1cm/s.Ces informations vous sont fournies sous réserve de vérification :)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Discussions similaires
-
ppm comment l expliquer
Par invite03f5a6f4 dans le forum ChimieRéponses: 1Dernier message: 21/09/2013, 21h43 -
Comment expliquer P(A et B) = P(A)*P(B) ?
Par invite00970985 dans le forum Mathématiques du collège et du lycéeRéponses: 5Dernier message: 27/02/2010, 12h03 -
[Génétique] Comment expliquer qu'une cellule...
Par invite734e09c7 dans le forum BiologieRéponses: 1Dernier message: 09/11/2008, 19h24 -
PCSI : Titrage conductimétrique de SO4(2-) par BaCl2 (Expliquer la courbe obtenue!)
Par inviteef2a3fb1 dans le forum ChimieRéponses: 6Dernier message: 10/09/2007, 17h40 -
comment expliquer??????????????
Par invite6d7c8fcb dans le forum ÉlectroniqueRéponses: 4Dernier message: 25/04/2005, 07h58