
Merci yvon I,
Très instructif.
-----

Merci yvon I,
Très instructif.
Bonjour,
j' ai trouver deux moteurs, le premier à l' inertie rotor a :3.4E-4
le second à: 2.63E-4
la vis a billes a un moment d'inertie de masse de 2.25E-4
Je pense prendre le second, qui est plus proche des valeurs de la vis à billes.
Est ce que j'oublie de prendre en compte un paramètre?
je n' utilise pas de réducteur dans les 2 cas.
Merci.
Reste l'inertie de la charge en translation (150 Kg) rapportée à la rotation via le pas de la vis à bille (moment d'inertie). (à ajouter au moment d'inertie de la vis)
Dernière modification par yvon l ; 17/10/2019 à 19h32.
Bonjour,
Auriez vous une formule?
Merci.
Moi j' ai ça :
Jme = Jm+Jv+(M/µv)*(P/2pi)²
J'imagine que Jme = inertie du mecanisme complet?
Est ce que:
(M/µv)*(P/2pi)²
serait l'inertie de ma masse ramener sur la vis?
Dans la feuille de calcul ci dessous:Envoyé par TONYGTI16

https://forums.futura-sciences.com/a...ur_v3.0-3-.xls
Tu trouveras les explications nécessaires que j'ai placées dans des info-bulles repérées par des petits carrés rouges dans les différentes cellules de la feuille (suffit de placer le pointeur de la souris sur ces carrés).
Cela devrait suffire pour la recherche du moteur et de la chaîne cinématique le mieux adapté. (La feuille est pré remplie pour exemple).
Pour la petite histoire j'avais élaboré cette feuille pour les amateurs constructeurs de petites machines à commande numérique
Les calculs concernent les moteurs de type pas à pas alimentés par des drivers à contrôle de courant maximum.
Merci bien,
Par contre pour mon cas c'est finalement des servomoteur AC.
Est ce que la feuille de calcul est adapté du coup, où ça na rien à voir?
Bon j' ai essayé de remplir la table mais je ne sait pas remplir dans la partis charges.
Où faut il que je mette l'effort de 180 N calculée avant?
A la ligne 33: effort d'usinage tu places 180.
Pour le servo je pense que c'est ok si c'est un moteur DC. (je ne vois pas bien un servo de type AC ?)
Le courant (ligne 16) est le courant de limitation imposée par le driver du moteur et le couple max (ligne 17) correspond au couple fourni par le courant de la ligne 16.
La puissance des pertes est à estimer suivant la grosseur du moteur (voir dimension des nema dans l'info-bulle
Pour un moteur DC: la tension max (ligne 15) correspondra à la vitesse max que doit atteindre le moteur (voir pour cela ligne 5: calculer ou voire la tension qu'il faut au moteur pour obtenir la vitesse linéaire donnée en ligne 5 ( vitesse de rotation suivant le pas)).
Je pense que le pas de ta vis est trop grand (32 mm).Donc tu devrais manquer de puissance à cause d'une vitesse moteur trop faible. Un pas de 10 mm peut-être serait mieux adapté (vitesse max et tension max multiplié par 3,2 ) (et courant divisé par 3,2)
Bon calcul
Je viens de regarder pour les servos AC .
-Regarde si l'inertie du rotor n'est pas plus grande que pour un servo DC de même importance (à mon avis meilleure performance pour le DC).
- Attention aussi que le moteur avec son driver doit être capable de freiner la charge. En freinage, l'énergie doit pouvoir être dissipée dans une résistance ou renvoyé au réseau. Le driver doit donc assurer un fonctionnement en 4 quadrants (rotation et freinage avant - rotation et freinage arrière). Pour les petits drivers, une résistance de puissance est prévue pour assurer la dissipation
Bonsoir,
J' ai beau tourner dans tous les sens je n'arrive pas a me décider concernant le choix entre c'est deux moteur.
J' ai affiné mais besoin, qui sont:
déplacer horizontalement une masse de 150kg située entre 2 rails à patins billes coeff frotement 0.0004 , sur une distance de 85 cm avec
une vis a billes de pas 25mm qui à une inertie de 2.25E-4
mes besoins: accelerer le plus vite possible et pouvoir parcourir la distance le plus rapidement possible.
a votre avis quel serait le moteur le mieux entre les 2 moteurs ci dessous?
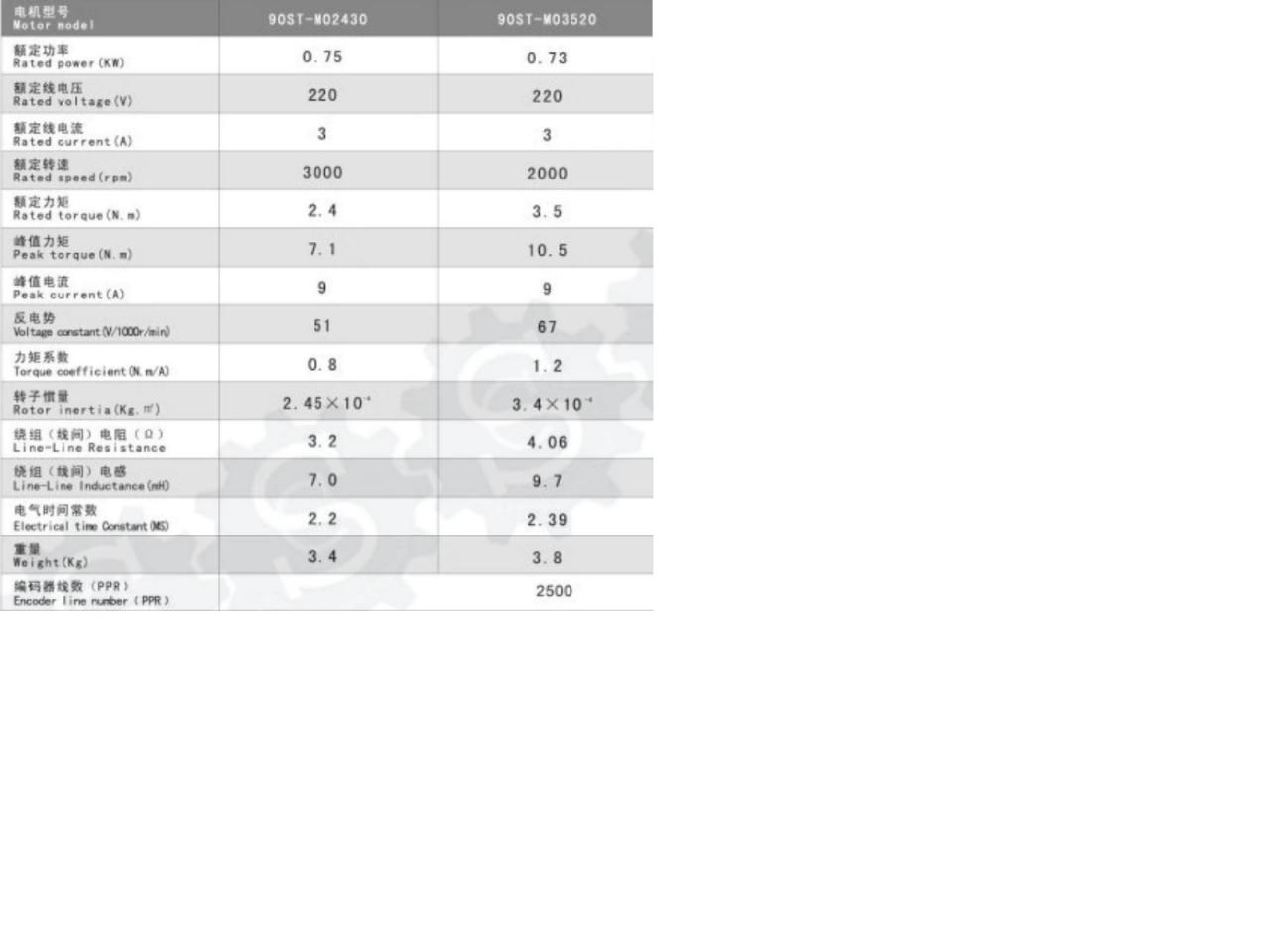
Bonsoir,
Je vais regarder cela demain.
Mais quelle type de moteur ? Asynchrone, brushless, ...
et quelle type de drivers pour alimenter le moteur.
N'oublie pas que pratiquement tu dois envisager un temps d'accélération pratiquement égal au temps de décélération. Donc drivers de type 4 quadrants.
Calcul préliminaire*:
1M en 2sec demande une accélération/décélération minimum de*:
accélération correspondant à un parcours de 0,5M en 1 sec soit a= 2.e/t²= 2. 0,5/1= 1m/s²
Si on prend cette hypothèse, le moteur pourra atteindre sa vitesse maximale N (3000 ou 2000 tr/mn) si on veut exploiter au mieux sa puissance ( P= 2pi.N.C/60 ) . Cest le couple nécessaire à laccélération plus le couple dû aux pertes mécaniques. Par contre lors de la décélération le couple des pertes vient aider le couple de freinage que le moteur doit fournir..
SERVOOO.jpgAASV15A.pdf
Je n'ais pas encore trouver quel type de moteur c'est exactement.
Le contrôleur quand a lui gère l' accel/decel..
Je pense qu'il faut que je prenne celui qui a le plus de couple et le moins de vitesse.
Mais je veux bien ton avis la dessus.
En te remerciant.
Bonjour.
OUI, pour ce moteur .
J’ai fait les calculs avec les valeurs suivantes (voir message #37 pour référence de la feuille de calcul):
No ligne---valeur
5------------- 0,8-----vitesse max
6-------------1,2------accélération max
10-------0,00034----inertie moteur
14-----------25-------perte moteur
15----------134------tension (2*67)
16-----------4--------I bobine
17-----------4--------couple max
18----------20-------réserve couple %
22-----0,000624---inertie de 1M de vis
23----------25-------pas de vis
24---------0,8-------rendement vis
25----------2--------longueur vis
31--------150-------masse à déplacer horizontalement
32----------0--------masse à déplacer verticalement
33--------290------effort (d’usinage)
On voit qu’on reste dans les clous tout en disposant d’un effort de 280 N (usinage) pour compenser les frictions
Remarque j’ai pris une accélération de 1,2m/s² car on atteint le palier de vitesse de 0,8m/s (vitesse max moteur de 2000 Tr/m).
Tu vois dans ces conditions que pratiquement la moité de la puissance sert à accélérer l'ensemble
N’oublie pas d’acheter aussi la résistance de freinage (Braking resistor ou regenerative resistor)
Sa puissance dépendra du nombre de cycles de freinage par minute ).
Dernière modification par yvon l ; 23/10/2019 à 12h32.
A corriger ligne 25 : 1m au lieu de 2m
Si tu ne trouves pas une vis au pas de 25mm, tu peux prendre une vis au pas de 20mm.
Mais tu dois alors utiliser le 1er moteur pour obtenir une vitesse suffisante .(3000tr, 2,4Nm)
Tu disposes alors de 275 N pour les efforts de type usinage.
Pour les nouveaux calculs:
No ligne---valeur
5------------- 1-----vitesse max
6-------------1,2------accélération max
10-------0,000245---inertie moteur
14-----------25-------perte moteur
15----------150------tension
16-----------3--------I bobine
17-----------2,4------couple max
18----------20-------réserve couple %
22-----0,000624---inertie de 1M de vis
23----------20-------pas de vis
24---------0,8-------rendement vis
25----------1--------longueur vis
31--------150-------masse à déplacer horizontalement
32----------0--------masse à déplacer verticalement
33--------275------effort (dusinage)
Si tu gardes le second moteur, il faut assurer une accélération de 2m/s² pour assurer avec une vitesse de 0,65m/s la distance à parcourir. Tu disposes alors dune force de 260 N (usinage). Par contre, la vis sera sollicité plus fortement à cause de limportance de laccélération (idem pendant le freinage), donc usure plus rapide de la chaîne cinématique
No ligne---valeur
5------------- 0,65-----vitesse max
6-------------2-------accélération max
10-------0,00034---inertie moteur
14-----------25-------perte moteur
15----------120------tension
16-----------3--------I bobine
17-----------3,5------couple max
18----------20-------réserve couple %
22-----0,000624---inertie de 1M de vis
23----------20-------pas de vis
24---------0,8-------rendement vis
25----------1--------longueur vis
31--------150-------masse à déplacer horizontalement
32----------0--------masse à déplacer verticalement
33--------260------effort (dusinage)

{kind=link}
{kind=link}