

Bonjour à tous,
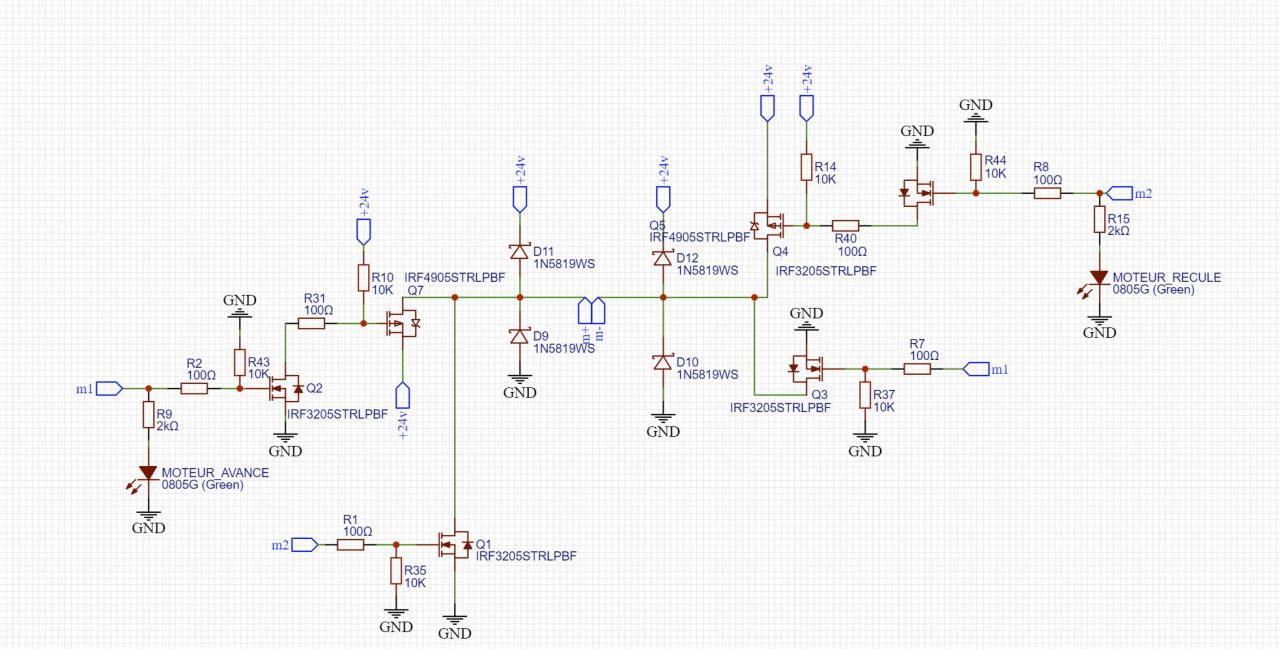
J’aurais aimé avoir votre aide sur un pont en H que je développe pour un de mes projets. Le but de ce pont en H est très simple : faire en sorte que le moteur branché à celui-ci effectue un nombre de tours bien précis.
Malheureusement, je rencontre un problème. Quand j'alimente mon pont en H pour la première fois, le moteur tourne en dessous du nombre de tours voulu (92% de son objectif). Si je le réactive juste après, le nombre de tours est correct, mais plus j'attends avant de le réactiver, plus l'objectif de tours redescend jusqu'à retomber à 92% de son objectif initial.
Pour vous donner plus de détails techniques :
Le pont en H est branché à un Arduino Nano ESP32 (pin en 3.3V).
Le pont en H est alimenté en 24V et le moteur est prévu pour une tension de 24V.
Les transistors choisis ont une valeur de résistance interne faible pour éviter d’impacter la tension entre l’alimentation et le moteur.
Le code pour faire fonctionner le pont en H :
J'aimerais avoir votre aide pour augmenter la précision de ce système.Code:cpp Copier le code for (int i = 0; i < 10; i++) { // Moteur marche avant amorçage delay(15); digitalWrite(3, HIGH); delay(15); digitalWrite(3, LOW); } digitalWrite(3, HIGH); // Temps voulu de l’activation du moteur delay(temps_moteur); digitalWrite(3, LOW); delay(250); // Délai pour ne pas court-circuiter le pont en H digitalWrite(2, HIGH); // Moteur marche arrière delay(100); digitalWrite(2, LOW); for (int i = 0; i < 10; i++) { // Moteur marche arrière freinage lent delay(15); digitalWrite(2, HIGH); delay(15); digitalWrite(2, LOW); }
En vous remerciant pour votre aide précieuse.
-----
