


Bonsoir tout le monde
Je tente de faire un petit robot solveur de labyrinthe. Je pensais que le plus dur était de programmer le 18F252... enfaite, c'est faire tourner les moteurs !
Pour mes tests, je fais comme suit :
Une sortie du PIC change d'état a chaque seconde. Cette sortie commande une entrée d'un ULN2003 (ou ULN2803). Ce dernier s'occupe donc de donner la puissance a mon moteur DC (d'une consommation de 20-30mA).
Si tout marchais comme prévu, le moteur devrais tourner pendant 1seconde, s'éteindre pendant 1seconde, et le cycle recommence.
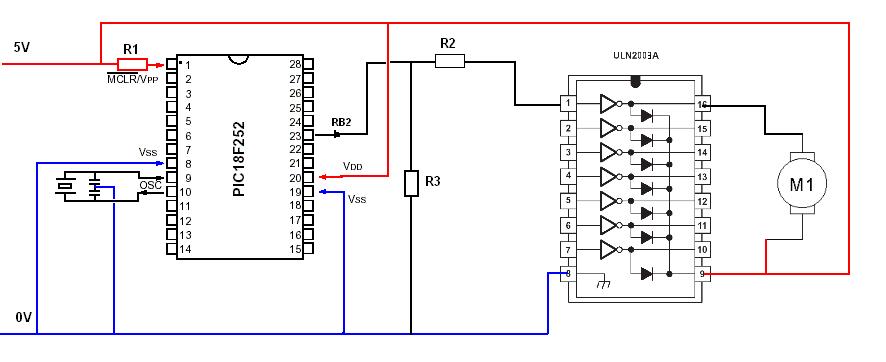
Seulement ça ne fonctionne que quelques secondes, après le PIC se met à consommer plus de 600mA, et l'état de sortie ne change plus !!! (Je débranche donc aussitôt).
J'ai donc pensé à rajouter des diodes de roues libres... aucun effet. J'ai donc mis un L293D à la place de l'ULN2003... aucun effet.
Si quelqu'un à une esplication/solution

-----

 Je pense que ça ne doit pas excéder les 200mA (c'est un petit robot).
Je pense que ça ne doit pas excéder les 200mA (c'est un petit robot).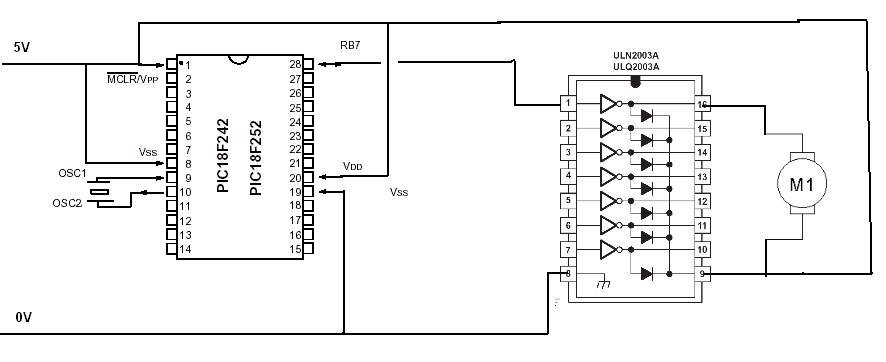



 Dommage.
Dommage.
 et tous les autres bien sûr
et tous les autres bien sûr 