Carte de contrôle et moteur 60W
Discussions similaires
-
Par invited499b898 dans le forum Technologies
Réponses: 1
Dernier message: 19/08/2013, 12h17
-
Par invite0c57bd01 dans le forum Électronique
Réponses: 11
Dernier message: 05/04/2013, 02h28
-
Par invite1fd582ea dans le forum Matériel - Hardware
Réponses: 4
Dernier message: 10/06/2011, 17h53
-
Par inviteccb09896 dans le forum Mathématiques du supérieur
Réponses: 0
Dernier message: 22/01/2011, 18h16
-
Par invite586bd2e5 dans le forum Électronique
Réponses: 5
Dernier message: 27/07/2009, 11h20


)





 ?
?

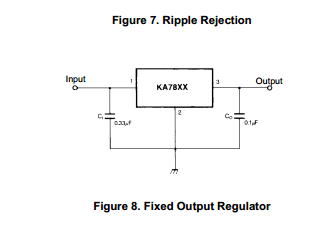 Ou la valeur des condensateur varies en fonction du voltage/courant en entré ?
Ou la valeur des condensateur varies en fonction du voltage/courant en entré ?