Bonjour à tous,
l'an dernier j'ai fait appel à vous pour contrôler deux moteurs dans les deux sens sans électronique. Du coup on utilisait deux interrupteurs trois positions pour commander la marche avant , la marche arrière et le fait de tourner (en n'activant qu'un moteur sur les deux).
Je suis professeur de physique, j'ai quelques notions de programmations mais cela ne va pas très loin. Cette année j'ai pour projet d'intégrer l'électronique dans la conception du robot.
En gros je souhaite pouvoir commander les deux moteurs du robot via une arduino uno et un shield moteur. Les moteurs cc sont alimentés en 12v. J'utiliserai avec les jeunes le logiciel arduino scratch pour que cela soit plus simple à comprendre pour eux.
En gros je voudrais qu'en activant
une pin 1 de la carte arduino , les deux moteurs tournent en avant
une pin 2 de la carte arduino , les deux moteurs tournent en arrière
une pin 3 de la carte arduino, un seul des deux moteurs
une pin 4 de la carte arduino, l'autre moteur
Cela parait tout bête mais j'ai beau cherché disons que je ne trouve pas une solution toute faîte, pourtant je suppose que ceci est la base d'une programmation robotique. J'ai vu des programmes pour commander un moteur. Mais pas plus loin.
Pourriez vous m'aider en me guidant dans mes recherches ?
Manu
-----

 : oui on a déjà traité ça mais je passe à l'étape programmation maintenant
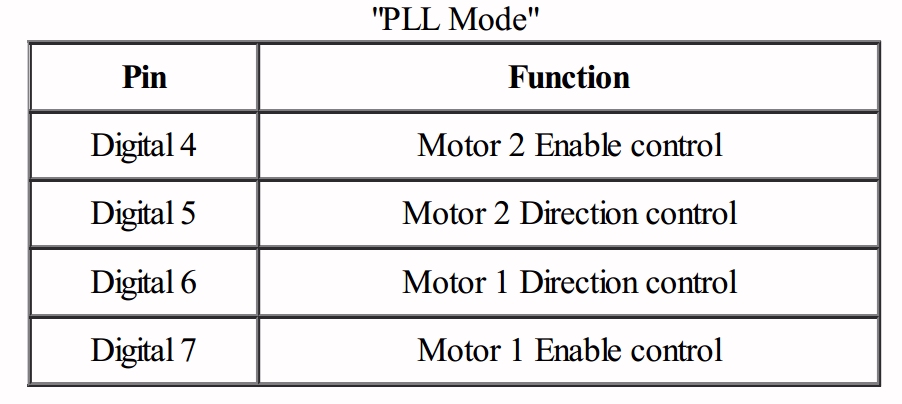
: oui on a déjà traité ça mais je passe à l'étape programmation maintenant  ), s'il est prévu pour deux moteurs aura 4 entrées, deux pour les faire tourner, deux pour le sens de rotation. Ces 4 entrées seront reliées à 4 sorties de ta carte Arduino. Avec tes inters branchés en entrée sur ta carte arduino tu agis comme bon te semble (c'est le but de la programmation) sur ces 4 sorties pour que les moteurs fassent ce que tu veux.
), s'il est prévu pour deux moteurs aura 4 entrées, deux pour les faire tourner, deux pour le sens de rotation. Ces 4 entrées seront reliées à 4 sorties de ta carte Arduino. Avec tes inters branchés en entrée sur ta carte arduino tu agis comme bon te semble (c'est le but de la programmation) sur ces 4 sorties pour que les moteurs fassent ce que tu veux.
 , il faut commencer par expliquer le plus précisément possible ce que l'on veut qu'il fasse ou quelle fasse: on appel ça un cahier des charges.
, il faut commencer par expliquer le plus précisément possible ce que l'on veut qu'il fasse ou quelle fasse: on appel ça un cahier des charges.