


Bonjour à tous :
J'ai attaqué récemment la régulation et j'ai à préparer un exercice dans le but d'un TP concernant la régulation de stabilité d'un segway.
Celle ci est composée de deux parties : j'ai réussi la première partie qui consiste à calculer la fonction de transfert tout d'abord sans retour , j'ai montré que le système était instable . Nous passons donc à la deuxième partie ou j'ai établi la Fonction de transfert du système complet ( rebouclé). Et je dois ensuite trouver les conditions pour que le système soit stable.La suite de l'exercice est vraiment très floue pour moi .
Donc si certaines personnes pourrait m'aider à le résoudre je leur en serait vraiment très reconnaissant.
Mon but ici n'est pas de repartir avec un exercice tout fait , j'ai juste besoin que l'on me guide , car j'ai passé pas mal de temps à réfléchir en vain.
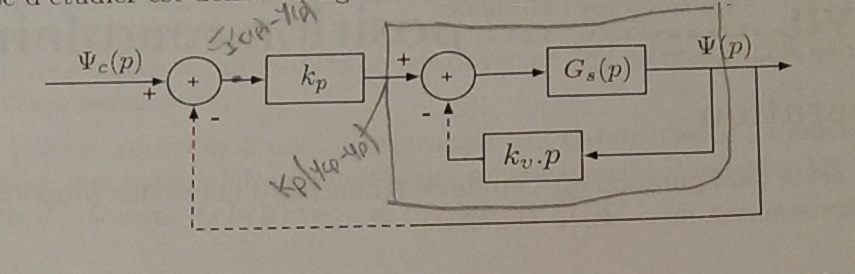
La fonction de transfert que j'obtiens est : (1/A) / ( p² + (Kv/a)*p +( (Kp-b)/a) ( j'obtiens ceci après mise sous forme canonique )
Je dois trouver la condition sur Kp et Kv pour que la boucle soit stable , j'imagine donc qu'il faut étudier les pôles et voir à quelle conditions les solutions sont à parties réelles négatives ? mais la je sèche , physiquement je pense comprendre que Kv doit être supérieur a Kp , pour que l'on vienne corriger le plus rapidement possible ? ( je joins le schéma )
Merci à tous ceux qui ont prit le temps de me lire et à ceux qui prendront le temps de me répondre.
Bonne soirée à tous.
-----