

Salut à tous,
Dans le cadre d'un projet d'asservissement d'un foil monté sur une embarcation (surf), j'aimerais mesurer la position du dit foil par rapport à la surface en mesurant la distance à la surface, par dessous donc.
J'ai un proto de la partie traitement et commande à base d'Arduino et d'un servomoteur de modélisme à fort couple.
Je pense utiliser le module SRM400 de Prowave, que j'ai trouvé sur Ebay et Farnell.
En attendant d'avoir mis la bête en boite, j'ai commencé des essais avec un sondeur autonome, le Plastimo Echotest (trouvable sous d'autres noms également) :
Photo sondeur
Les essais montrent que la mesure de la distance à la surface sont réalisables.
J'aimerais m'inspirer de ce sondeur en terme d'amplitude, de fréquence, de nombre de pulses, de traitement du signal, etc.. afin d'éviter de trop y passer de temps.
Photo circuit
J'ai commencé à dessiner le circuit électronique, la partie émission me semble classique, Fetmos, transfo, capa en parrallele et transducteur piézo.
En revanche la partie traitement du signal reçu n'est pas évidente.
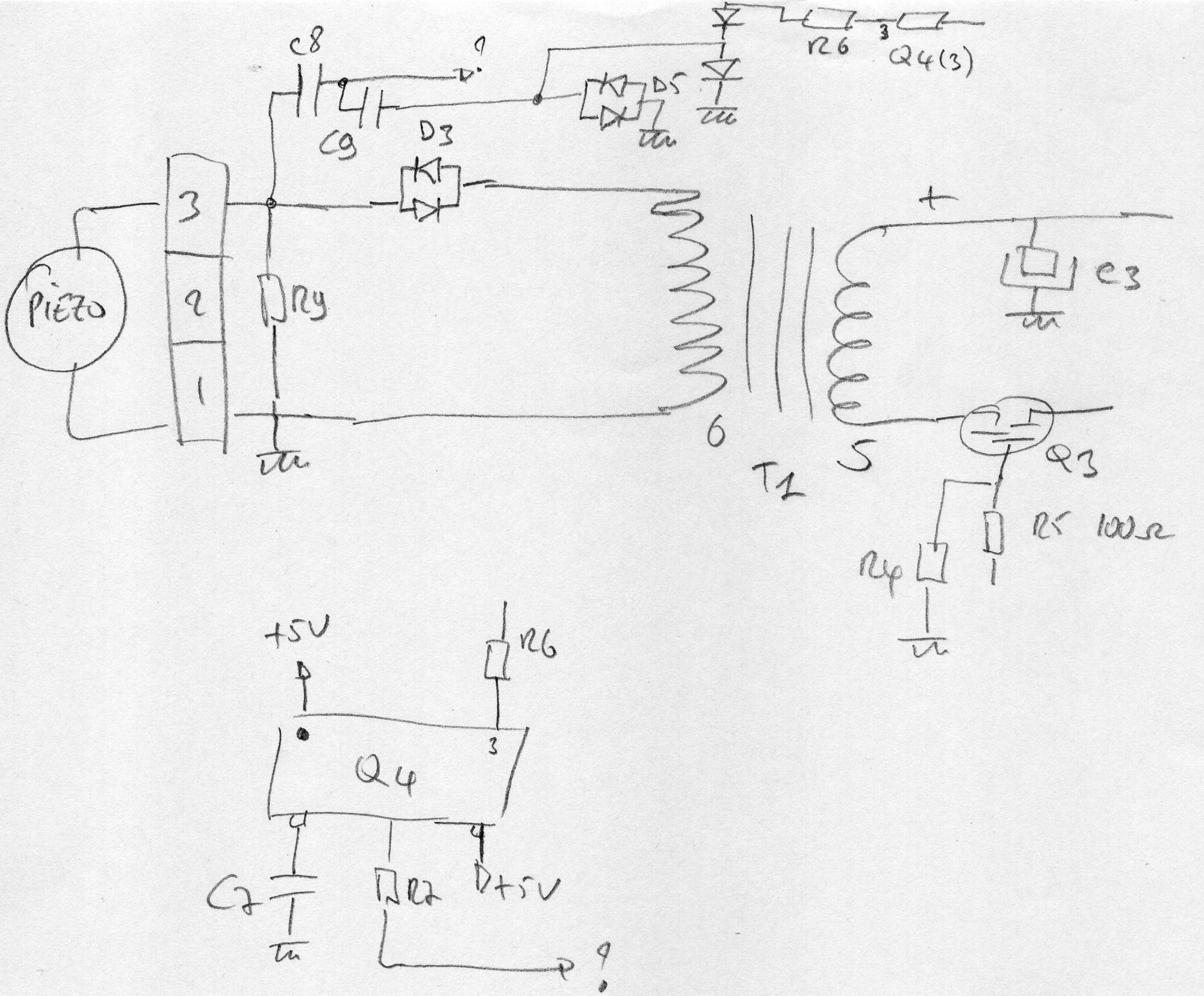
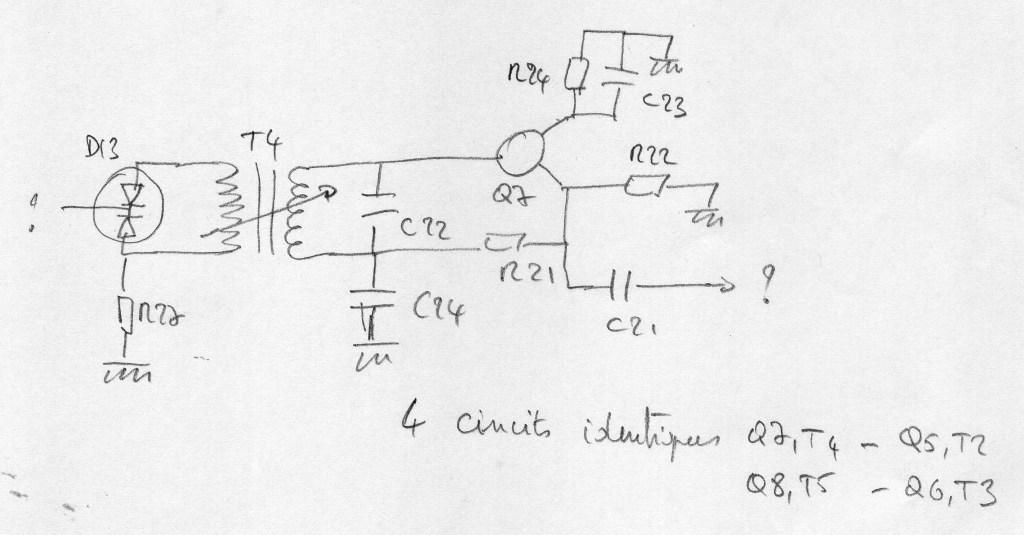
Scan schéma
Le piézo est unique, c'est à dire qu'il émet durant une brève période et ensuite il écoute, l'émission se fait avec une tension de 100V environs, je suppose que la réception doit être de l'ordre de qlq mV.
Je suppose qu'il doit y avoir un filtrage de la fréquence du signal reçu centré sur la fréquence du signal envoyé, que le circuit doit être double puisqu'on peut choisir 200 ou 400kHz, mais je ne saisi pas encore le pourquoi des selfs ajustables (transfos), ni où poser ma sonde d'oscillo pour avoir le signal en fin de traitement...
Qui peut m'en dire d'avantage ?
Fred
PS je cherche comment insérer des photos, ça va venir !
-----


{kind=link}
{kind=link}
{kind=link}
{kind=link}