

Bonjour à tous,
J'utilise le CAN du PIC18F45K22 afin de lire l'entrée d'un potentiomètre de 10KOhm.
Je n'ai jamais utilisé le CAN, j'ai regardé sur la Datasheet les différents registres à paramétrer.
Travaillant sous MPLABX v2.10 avec XC8 comme compilateur, je voulais utiliser le simulateur afin de vérifier le résultat de ma conversion en temps réel.
N'ayant jamais utilisé le simulateur, est ce que c'est possible?
Je pensais mettre le résultat de la conversion dans une variable, et ensuite la visualiser.
Merci,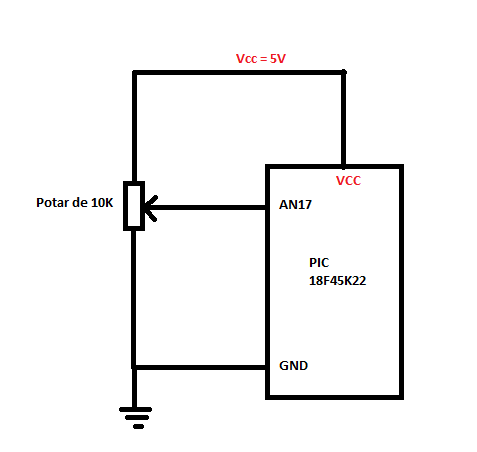
-----


