non , on sait mal compris j'ai des bases en algorithmique .
Mais pas celle en C ni en C + . Il faut savoir que au debut du if ,il y a les termes countLoop et nToAvg qui servent à définir des variables .
je ne comprends pas déja pourquoi les variables servo1total et countLoop sont initialisés à la valeur 0 .
Donc if (quelque chose )
je fait la moyenne de servo1total
return (le résultat au servo) avec le Serial.print(servo1=)
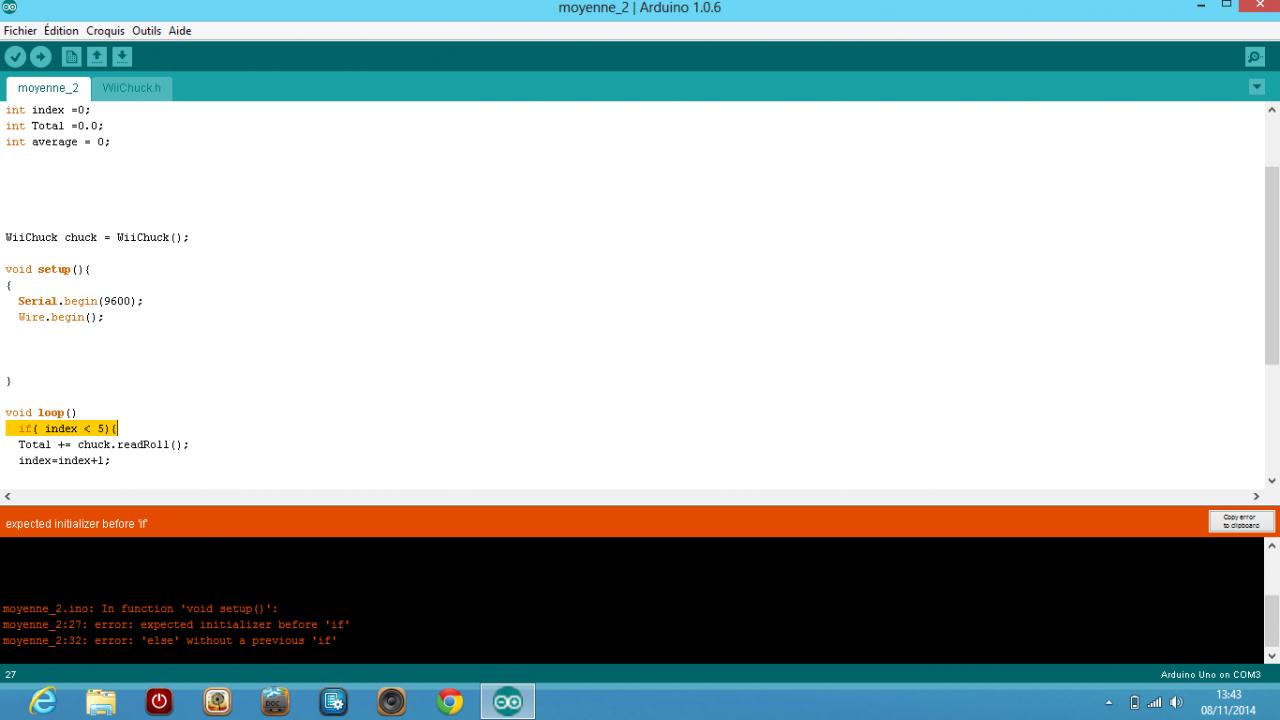
J 'ai déja du mal à comprendre la condition if countLoop == nToAvg
donc si count loup egale à 5 ,mais ,count loop s'est quoi, le nombre de lectures réaliser par le système ?
-----