Bonjour
Dans le cadre de la fabrication d'un robot qui se déplace, j'essaye d'alimenter et de piloter correctement 4 moteurs de ce type :
Moteur en acier de 6 VCC Wild Thumper avec boîte d'engrenages 75:1
Courant (hors charge) : 350 mA
Couple de décrochage : 8,8 Kg/cm
Tr/min du moteur : 10000 +/- 5%
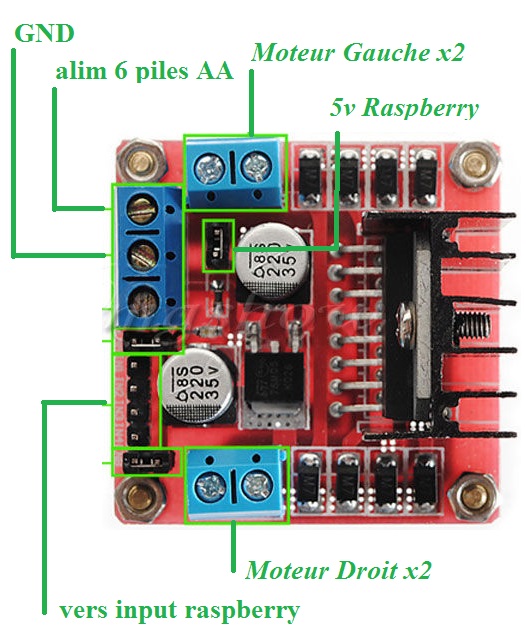
Pour gérer le sens de rotation des moteurs et leurs correcte alimentation je passe par un pont en H de type L298N. (carte toute faite incluant les diodes de roue libre)
La partie logique du L298N est alimentée et gerée par un Raspberry pi B+.
Les moteurs sont alimentés par 6 piles AA. Les quatre moteurs branchés en direct sur l'alimentation fonctionnent parfaitement par contre en passant par le L298N les quatre roues tournent au ralenti.
Merci d'avance pour l'aide apportée.
-----