

Bonsoir,
Rappel de la datasheet : http://www.farnell.com/datasheets/71444.pdf
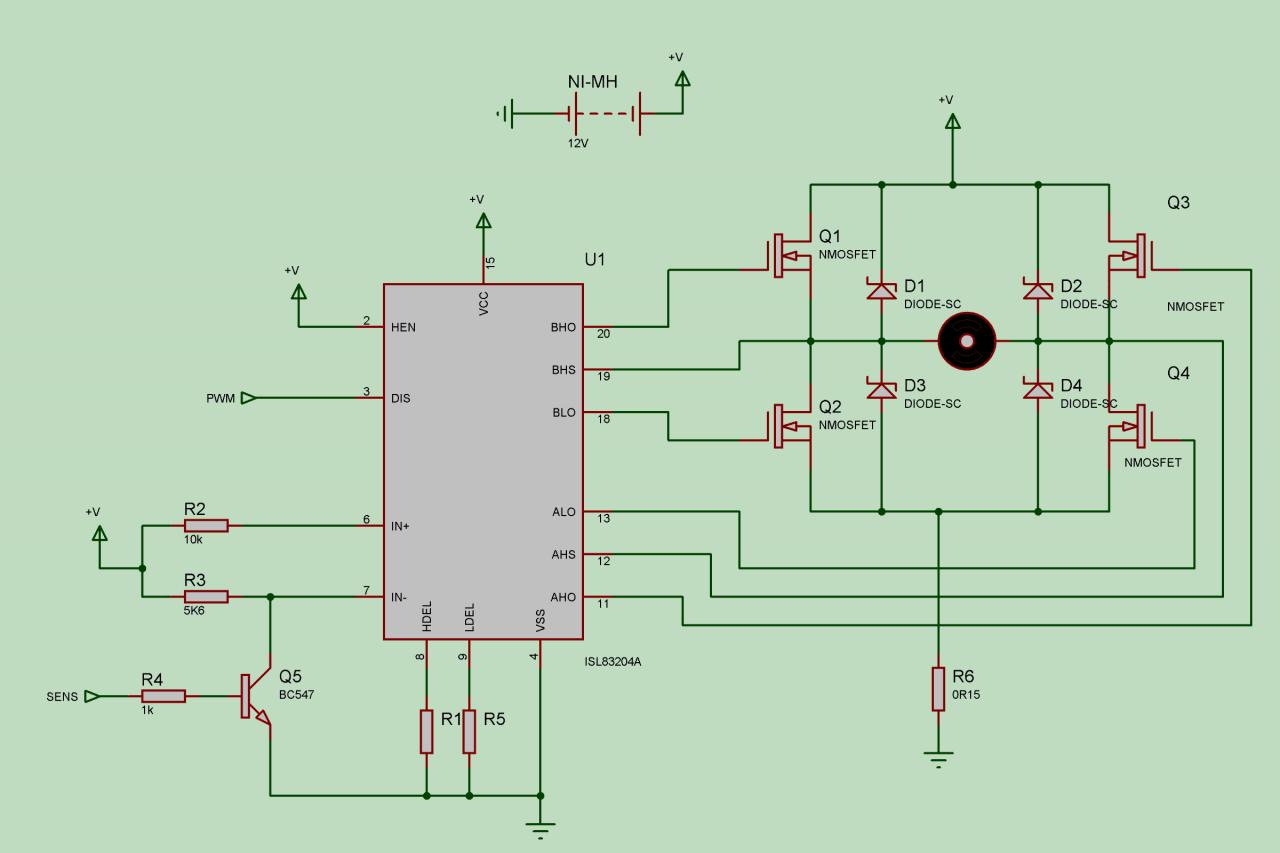
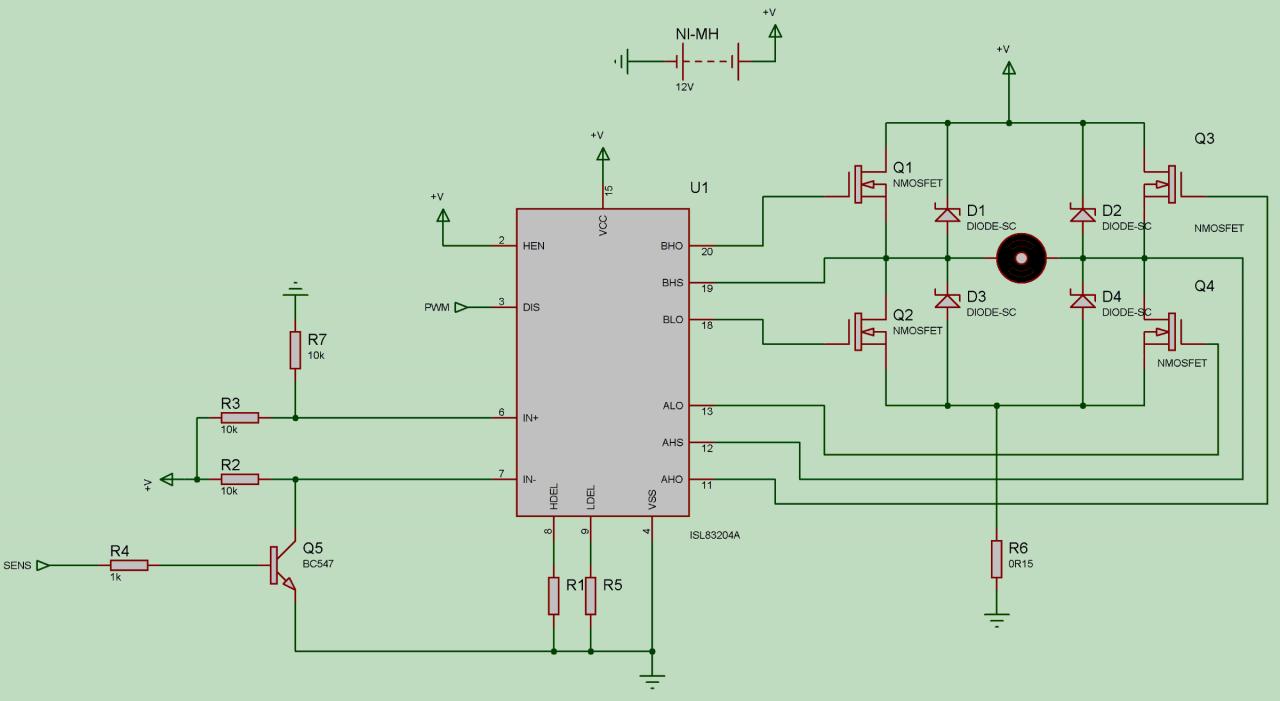
Le courant passe par l'un des transistor low-side et par la diode de body (de roue-libre) de l'autre transistor low-side.Envoyé par sandrecarpe

Oui.
La partie de l'explication concernant DIS=1 n'étant valable que si le moteur est en conduction continue (le courant ne s'annule jamais, grcae à l'inductance du rotor).
Ca dépend sur le sens dans lequel circule le courant dans le moteur et de la valeur de V(IN+)-V(IN-). Selon, l'un des points suivants est valide :
- au moment ou HEN est à 0, l'un des mosfet low-side (et seulement celui-là) est passant, le courant passe donc par ce mosfet et par la diode de roue-libre de l'autre mosfet low-side. C'est plus simple pour le courant que de passer par l'alim.
- au moment ou HEN est à 0, l'un des mosfet low-side (et seulement celui-là) est passant, le courant passe donc par ce mosfet et par la diode de roue-libre du mosfet high-side opposé, via l'alimentation.
Car rien n'est parfait en ce bas-monde. Les différentes asymétries dans le montage électronique fera qu'il y aura toujours une tension moyenne non-nulle aux bornes du moteur, même si tu lui demande d'envoyer un PWM de dc=50%. Les divers frottements sec du robot seront cependant peut-être déjà suffisant pour assurer un maintient en position.
Il me semble que tu as bien un couple statique (i.e. sans que le moteur tourne) lorsque le moteur est alimenté à tension moyenne nulle mais tension RMS non nulle.
Concernant la récupération d'énergie : il n'est généralement possible de récupérer qu'assez peu d'énergie si tu négliges l'effet de l'inductance, dès que la tension de la FCEM du moteur descend en deça de la tension de la batterie, plus aucune énergie ne peut circuler naturellement du moteur vers la batterie. La récupération d'énergie n'est donc possible que :
- brièvement, le temps de décharger l'inductance ;
- lorsque le moteur est accéléré mécaniquement (e.g. en pente) au delà de la vitesse atteignable lorsqu'il est alimenté par la batterie (@ dc=1).


-----




{kind=link}
{kind=link}