


Bonjour a tous!
Dans le cadre d'un petit projet d'elec, je souhaite remplacer l'intégralité (du moins je lespère) de la chaine de commande du MOSFET d'un Flyback par un PIC.
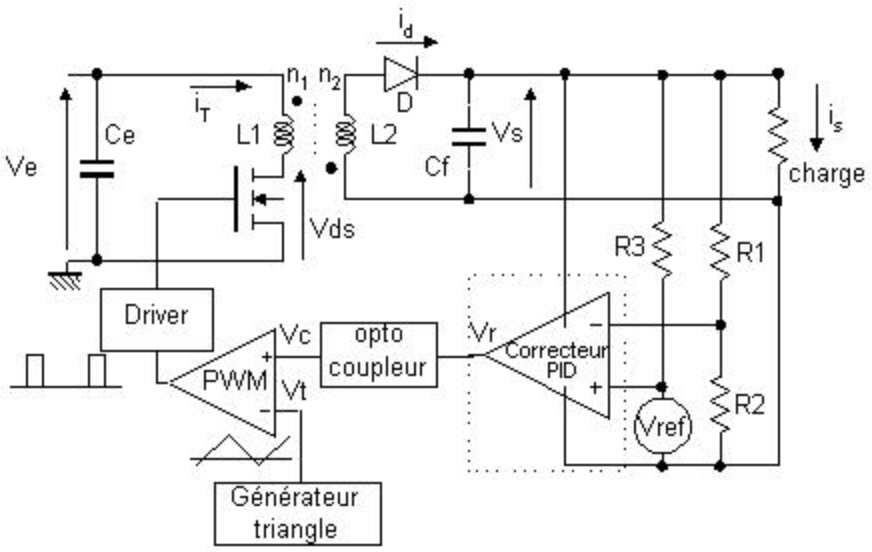
Ci-dessous le schéma du Flyback avec la chaine d'asservissement :
Je vais faire de la commande PWM et de la commande PFM (je sais qu'il est possible d'overclocker la fréquence de sortie du PIC grâce à des PLLs) et je vais très certainement utiliser un PIC18F. J'ai cependant quelques questions :
1) Puisque le transfo isole la sortie de l'entrée une partie de la boucle de régulation (comparateur) doit être alimentée sur la sortie pour un asservissement le plus précis possible. L'autre partie qui commande le driver est alimentée sur l'entrée. C'est pourquoi un place un auto-coupleur au milieu de la chaine d'asservissement pour conserver cette isolation galvanique. Ainsi le but de mon projet étant de remplacer tous les éléments par un PIC, je ne sais pas ce qu'il en est pour l'alimentation de ce dernier. C'est-à-dire dois-je l'alimenter sur l'entrée/sortie? Est-ce que l'isolation va être respecté?
2) Ca rejoint un peu ma première question : Après étude des datasheet les blocs PWM, PFM, Correcteur PID ainsi que CAN et DAC (pour échantillonner le courant de sortie) peuvent être "codé" dans le PIC. Seulement je ne suir sur de rien pour ce qui est de la tension de référence nécessaire au PID (est-ce que je peux gérer au niveau de la programmation du PID dans le PIC ?)
Voila, donc avis au personnes qui ont déja fais de l'asservissement par des PIC, si vous pouvez m'éclairer sur mes deux questions ce serait sympa!
Merci d'avance

-----



