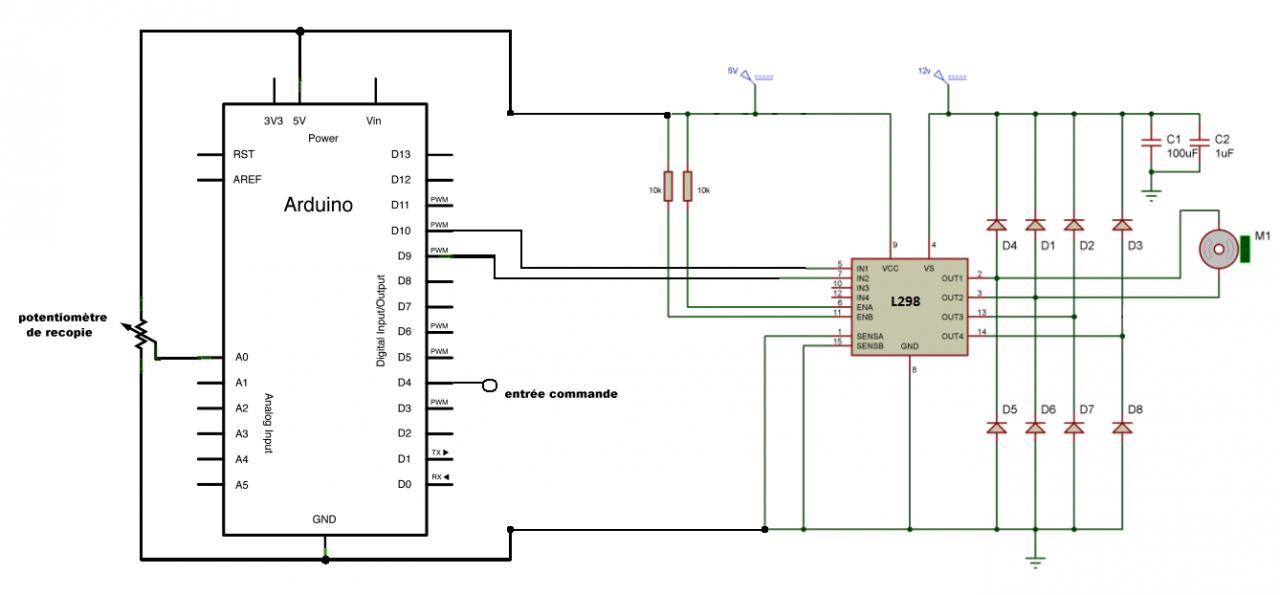
Bonjour, je souhaite 'fabriquer" un servomoteur, l'idée est de piloter sur 180° un moto-réducteur via un pont en H, la positon serait mesuré a l'aide d'un potentiomètre et la consigne est un signal provenant d'un récepteur rc, il s'agit d'un signal haut variant de 1ms (0°) a 2ms (180°) toutes les 20ms.
Pensez que tout ça peut être gérable par une carte Arduino ?
Merci beaucoup
-----