

Bonjour a tous !
Je me mets gentiment à la robotique depuis quelques temps. J’ai maintenant assez de composants pour pouvoir commencer à bricoler un peu (yehaaa !).
Du coup, la solution la plus simple pour la partie mécanique est d’utiliser des LEGOs… oui ^^,
Lorsque j’étais au chômage y’a 2 ans, j’ai un peu regardé sur youtube comment les LEGO Technic ont pu évoluer dans les 10 dernières années… Bah j’ai eu une grosse surprise, on peut programmer en C, Assembleur et toute une autre gamme de langages des briques intelligentes, les moteurs sont largement plus puissants et les briques LEGO elles même ont évoluées…
Du coup j’ai vendu mes vieux LEGO pour en acheter des nouveaux ^^,
J’ai fait un petit robot hexapode, j'aimerai le commender via un raspberry PI et développer l’étage de puissance moi-même pour commander ces moteurs et des capteurs fait maison.
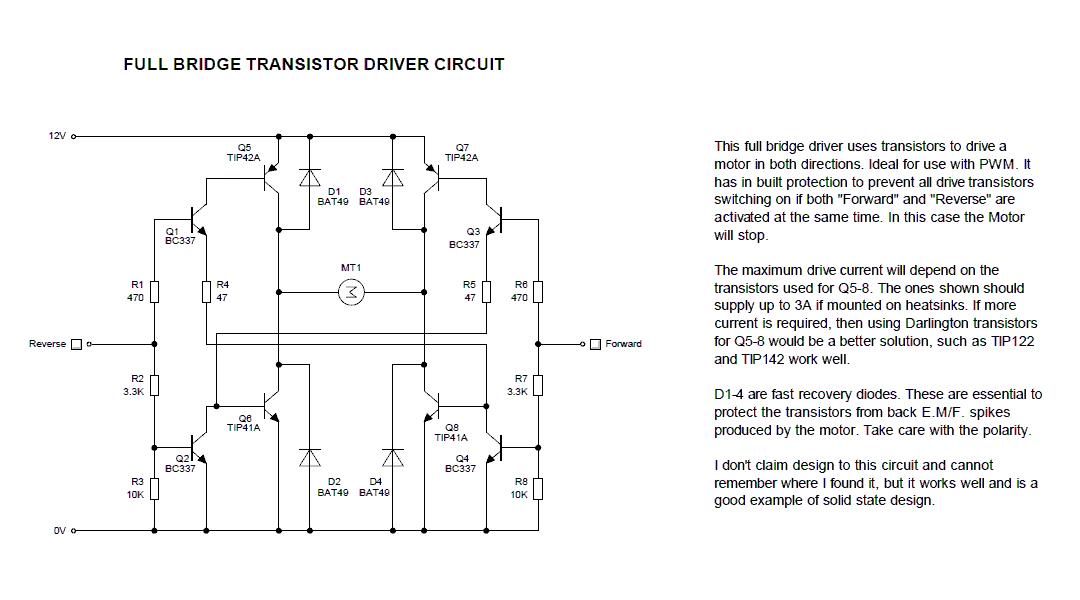
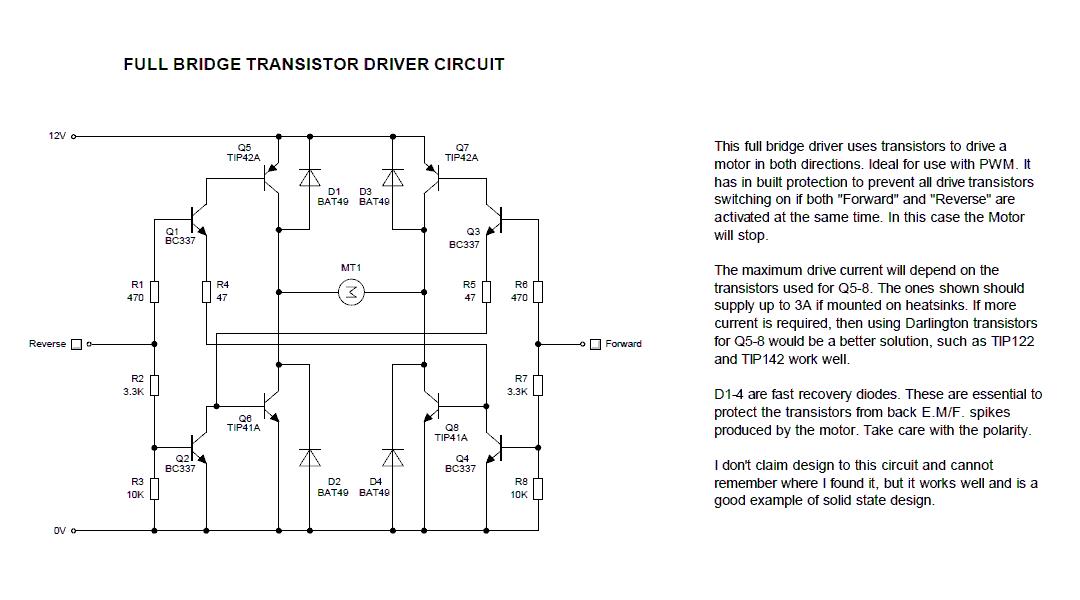
Etape 1 : Pont en H pour commander les moteurs dans les deux directions.
C’est la qu’arrivent mes questions…
Je veux commander un moteur LEGO power function M dont les caractéristiques sont les suivantes
31g
9V
65mA (sans charge)
850mA (Bloqué)
405 rpm
( http://www.philohome.com/motors/motorcomp.htm )
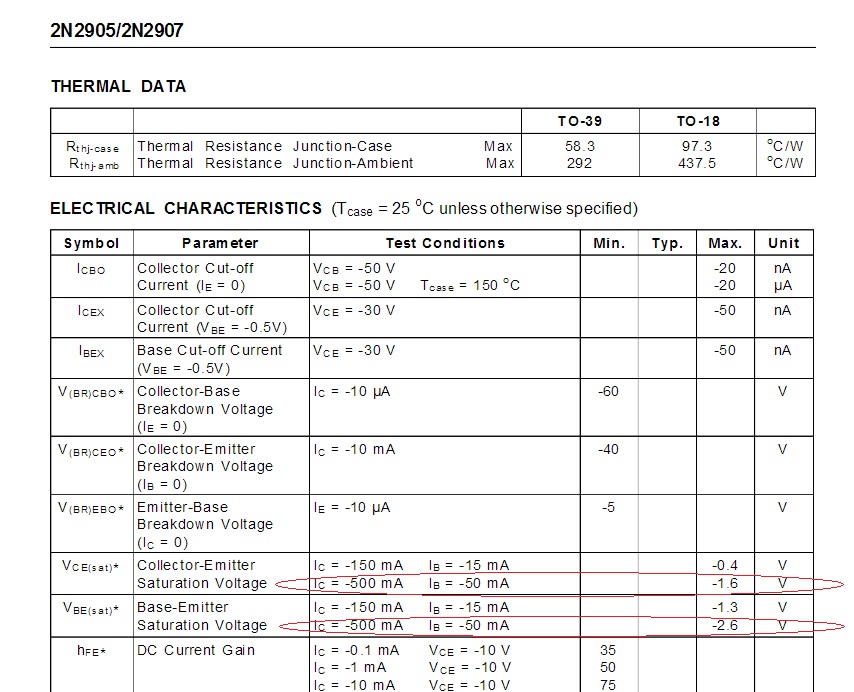
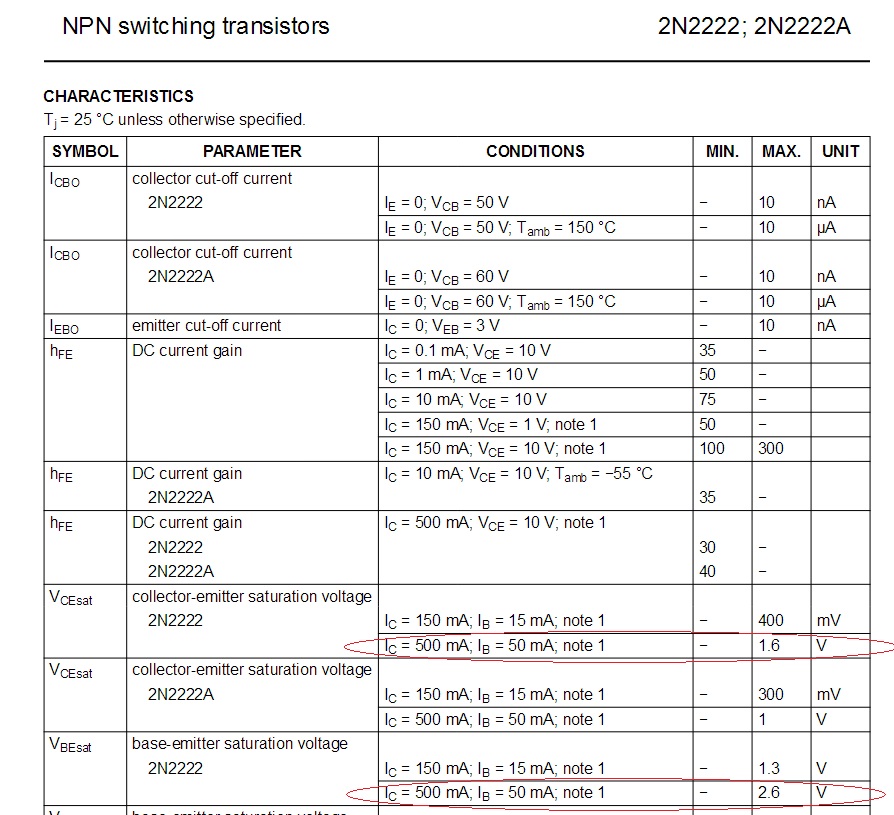
En un premier temps, j’essaye de faire tourner le moteur dans un sens avec un demi pont en H, donc seulement 2 transistors, un PNP 2N2907 et un NPN 2N2222, j’essaye de commander 100mA qui devraient être suffisants à vide
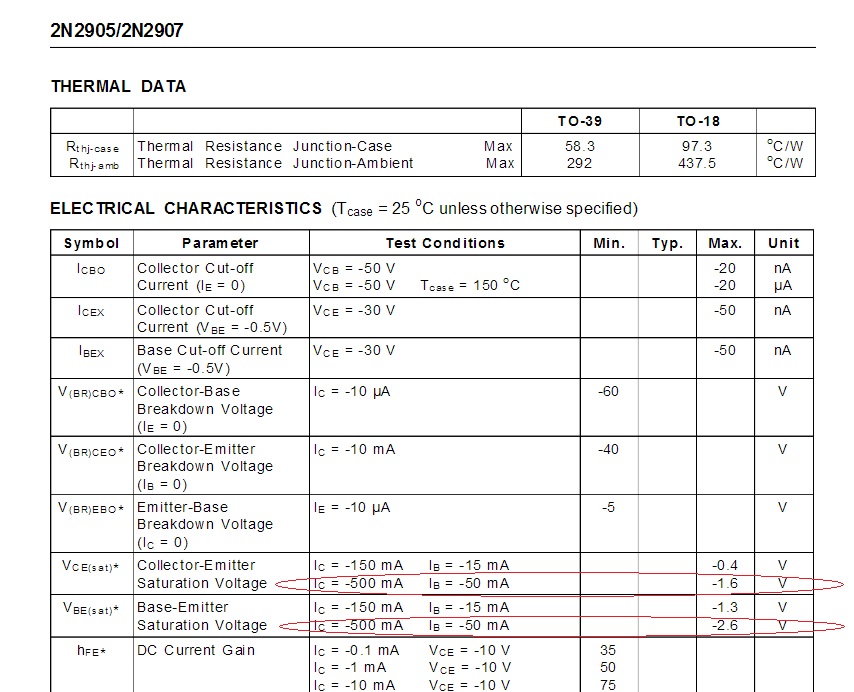
Datasheets :
2N2907 - http://pdf1.alldatasheet.fr/datashee...PS/2N2907.html
2N2222 - http://pdf1.alldatasheet.fr/datashee...PS/2N2222.html
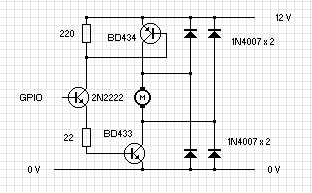
Voici le schéma du montage avec les valeurs et calculs :
######### suppression d'image externe
Seulement, une fois que je met ce montage en œuvre, le moteur n’arrive pas à démarrer, mais si je l’aide (en tournant l’axe avec les doigts) il se met à tourner avec une vitesse absolument ridicule et est très facile à arrêter comparé à lorsqu’il est branché directement à la batterie LEGO.
J’ai donc fait quelques mesures sans grand succès, les transistors ne sont pas complétement passants avec les valeurs de résistances calculées, ils ont tous les deux environ 3V de pertes pour Vce.
J’ai modifié les valeur des résistances, les revoyant à la baisse (divisé par 2) et le moteur tourne plus vite, mais il n’a toujours pas assez de couple. Je ne lui demande pas de se lancer seul, mais juste d'avoir la meme puissance de sortie a vide.
J’ai installé des résistances variables pour avoir bien 9V aux bornes du moteur, on a 52 mA qui passent à travers le moteur…
Du coup, je me suis peut être planté quelque part dans mes calculs ?
Mais normalement je suis large… Béta = 75 Vbc = 1.5V au lieu de 0.7 considéré habituellement (j’ai mesuré lorsque le transistor est passant) etc…
J’ai des doutes autour du transistor PNP en haut et aussi concernant leur capacité à délivrer cette intensité avec cette tension.
En tous les cas, j'ai cherché et me suis gratté la tête, je suis passé par Mr Google et Youtube, sans succès, tout le monde semble réussir à faire ce montage sans soucis...
Merci d’avance pour votre aide
-----



 )
) ) je verrai plus tard pour griller mon raspberry pi
) je verrai plus tard pour griller mon raspberry pi 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}