


Bonjour à tous, je suis en Terminale S SI donc nous avons un projet à rendre en fin d'année et avec mon groupe notre projet consiste à créer un robot pouvant se déplacer en grâce à des modules Arduino. Il sera également équipé d'un capteur de distance Infrarouge Sharp branché en Arduino, pouvant indiquer sur un écran la distance des obstacles se trouvant devant et autour de lui. Il serait placé sur un servo moteur ce qui lui permettrai de tourner à 180°.
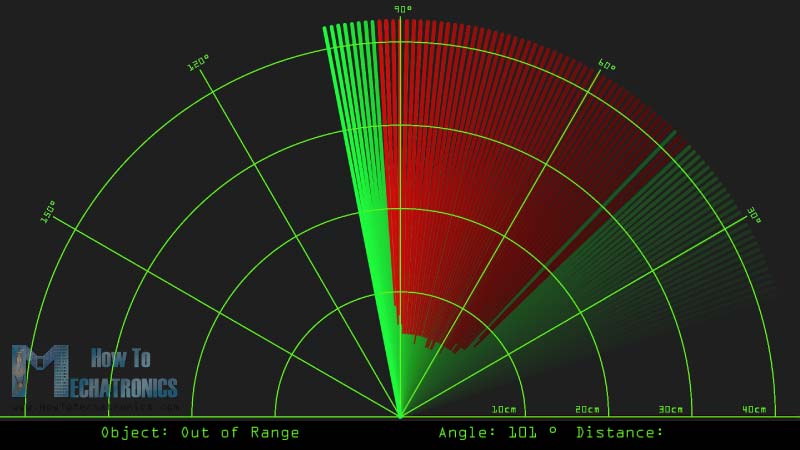
L'affichage du radar grâce à un capteur à Ultrason étant déjà fait et moins précis qu'un capteur Infrarouge nous ne l'utiliserons pas. Nous voudrions utiliser le capteur IR de la même façon que le capteur Ultrason, c'est à dire convertir les informations numériques reçu sur l'écran et au lieu de nous retrouver avec une série de lignes avec les valeurs de distances, d'angles etc..
Pour vous montrer ce que nous voulons voici une image tiré d'une vidéo:
Le code utilisé est disponible ICI.
Le seul problème c'est que nous ne savons pas comment transformer le code pour le faire sur notre capteur, et même si nous pouvons le faire
Voilà je vous remercie d'avance pour vos réponses et je m'excuse également de mes explications peu précises mais c'est encore flou pour nous également
-----

