Bonjour
j'utilise actuellement un arduino Mega qui me sert a activé ou désactivé 60 sorties qui est piloté par le logiciel Vixen
le code en lui même fonctionne très bien pas de souci la dessus.
seulement ca fonctionne qu'avec un seul arduino.
Seulement je voudrait ajouter cette fois-ci un arduino UNO qui sera connecté en série avec le premier arduino MEGA
qui ajoutera des sorties supplémentaires au premier arduino MEGA.
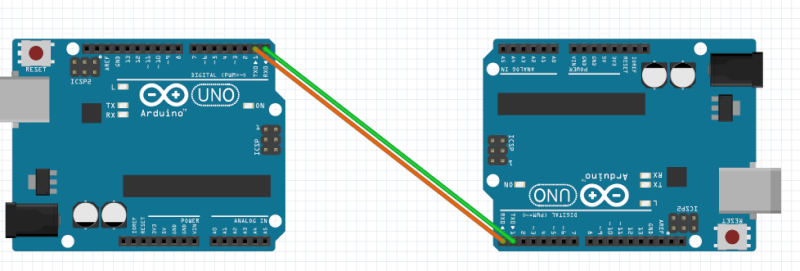
Seulement la je bloque j'ai connecté le TX le +5v et la masse du premier arduino MEGA
vers le RX +5v et la masse vers le second arduino UNO
je transfère le même code en mettant moins de sortie bien évidement seulement 10 pour le UNO mais ca ne fonctionne pas.
parfois même ca me fait planté le 1er arduino MEGA
Voici le code que j'ai pu voir sur le net qui me sert a piloté l'arduino via le logiciel Vixen
Est-ce que c'est possible de mettre des arduino en série ?Code:#define CANAL_01 2 #define CANAL_02 3 #define CANAL_03 4 #define CANAL_04 5 #define CANAL_05 6 #define CANAL_06 7 #define CANAL_07 8 #define CANAL_08 9 #define CANAL_09 10 #define CANAL_10 11 #define CANAL_11 12 #define CANAL_12 13 #define CANAL_13 14 #define CANAL_14 15 #define CANAL_15 16 #define CANAL_16 17 #define CANAL_17 18 #define CANAL_18 19 #define CANAL_19 20 #define CANAL_20 21 #define CANAL_21 22 #define CANAL_22 23 #define CANAL_23 24 #define CANAL_24 25 #define CANAL_25 26 #define CANAL_26 27 #define CANAL_27 28 #define CANAL_28 29 #define CANAL_29 30 #define CANAL_30 31 #define CANAL_31 32 #define CANAL_32 33 #define CANAL_33 34 #define CANAL_34 35 #define CANAL_35 36 #define CANAL_36 37 #define CANAL_37 38 #define CANAL_38 39 #define CANAL_39 40 #define CANAL_40 41 #define CANAL_41 42 #define CANAL_42 43 #define CANAL_43 44 #define CANAL_44 45 #define CANAL_45 46 #define CANAL_46 47 #define CANAL_47 48 #define CANAL_48 49 #define CANAL_49 50 #define CANAL_50 51 #define CANAL_51 52 #define CANAL_52 53 #define CANAL_53 A0 #define CANAL_54 A1 #define CANAL_55 A2 #define CANAL_56 A3 #define CANAL_57 A4 #define CANAL_58 A5 #define CANAL_59 A6 #define CANAL_60 A7 #define NBS_CANAUX 60 #define BAUD_RATE 57600 int CANAUX[] = { CANAL_01, CANAL_02, CANAL_03, CANAL_04, CANAL_05, CANAL_06, CANAL_07, CANAL_08, CANAL_09, CANAL_10, CANAL_11, CANAL_12, CANAL_13, CANAL_14, CANAL_15, CANAL_16, CANAL_17, CANAL_18, CANAL_19, CANAL_20, CANAL_21, CANAL_22, CANAL_23, CANAL_24, CANAL_25, CANAL_26, CANAL_27, CANAL_28, CANAL_29, CANAL_30, CANAL_31, CANAL_32, CANAL_33, CANAL_34, CANAL_35, CANAL_36, CANAL_37, CANAL_38, CANAL_39, CANAL_40, CANAL_41, CANAL_42, CANAL_43, CANAL_44, CANAL_45, CANAL_46, CANAL_47, CANAL_48, CANAL_49, CANAL_50, CANAL_51, CANAL_52, CANAL_53, CANAL_54, CANAL_55, CANAL_56, CANAL_57, CANAL_58, CANAL_59, CANAL_60, }; int OCTET_ENTRANT[NBS_CANAUX]; void setup() { Serial.begin(BAUD_RATE); // CONFIGURE CHAQUE CANAL COMME SORTIE for(int i = 0; i < NBS_CANAUX; i++) { pinMode(CANAUX[i], OUTPUT); }} void loop() { // LECTURE DES DONNÉES DE VIXEN PUIS STOCK LES VALEURS DANS UN TABLEAU if (Serial.available() >= NBS_CANAUX) { for (int i = 0; i < NBS_CANAUX; i++) { OCTET_ENTRANT[i] = Serial.read(); } // LIT LES DONNÉES PUIS ACTIVE LES SORTIES for (int i = 0; i < NBS_CANAUX; i++) { digitalWrite(CANAUX[i], OCTET_ENTRANT[i]); }}}
si oui est-ce que le code convient pour le second ?
-----

 ...
...