

Bonjour,
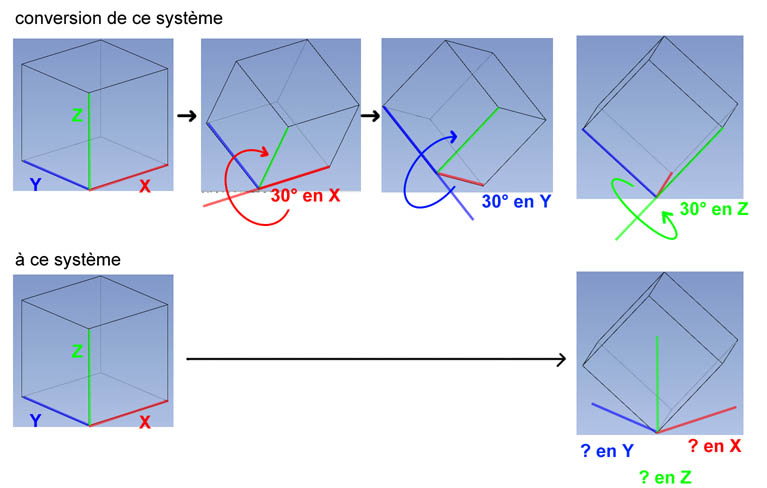
Je cherche le moyen de convertir des angles x,y,z (rotation d'un objet sur les 3 axes) d'un système en un autre. Je recherche des angles, les nouvelles coordonnées de points de l'objet ne m'intéressent pas.
Je crois que le 1er système est le système Euler, et le second ??? où les axes de rotation restent dans la même position.
merci
-----