Bonsoir.
L'énoncé suivant n'est pas un exercices de cours, mais j'y ai réfléchi il y a quelques jours et je n'en ai pas trouvé la solution (et ça m'énerve). Je viens donc chercher un peu d'aide sur ce forum, au cas ou quelqu'un sache...J'ai tenté de transformer le problème en énoncé mathématique.
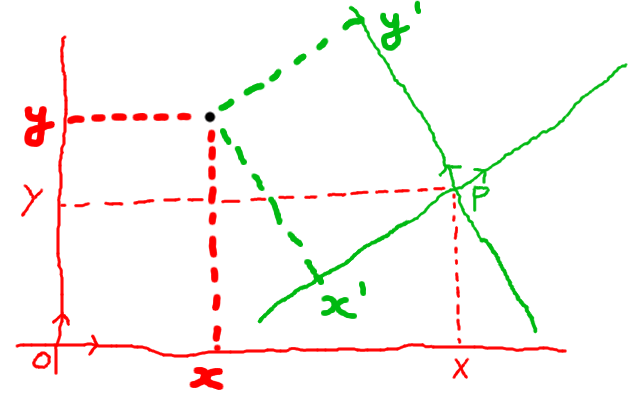
Soit (O, i, j, k) un repère orthonormé; soit P(u, v, w) un autre repère orthonormé dont les axes (u, v, w) forment (respectivement) un angle () (respectivement) avec les axes (i, j, k), et ou P est aux coordonnées (X, Y, Z) par rapport à O.
Trouver la fonction f, la matrice M, ou que sais-je encore permettant de trouver à partir des coordonnées d'un point A dans le repère O, ses coordonnées dans le repère P, ainsi que son inverse pour passer de P vers O.
Typiquement, si (
J'ai essayé pas val de fois, et j'ai échoué à chaque fois (trop de sinus/cosinus dans tous les sens), sachant que meme si je ne suis pas hermétique aux maths, je suis quand meme meilleur en info. (d'ailleurs, je préférerait une solution avec le moins de trigo possible parce que c'est assez couteux quand meme. Une matrice serait don, je pense, préférable)
-----