Bonsoir tous,
je fais 2 rotations(autour de z) et ensuite
Avant de commencer, juste pour être certain que l'on est bien d'accord (?) quelques rappels :
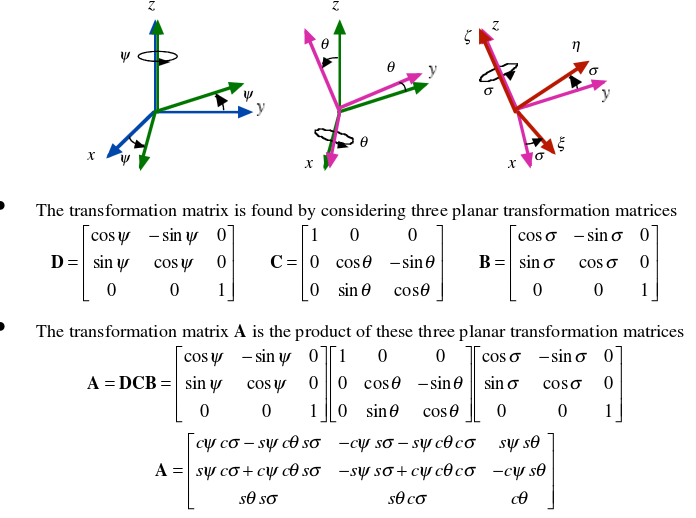
- Matrice de transformation des vecteurs de base :
- Matrice de passage "P" (qui permet d'exprimer les nouvelles coordonnées en fonction des anciennes) sont les transposées des matrices
Calcul n°1 : les résultats me paraissent indiscutables car je retrouve des formules de mes cours de mécanique
on a
soit au final
Calcul n°2 : je ne comprends pas pourquoi je ne retrouve pas le résultat ci-dessus
Soit un vecteur
et le vecteur
Si je remplace
alors on trouve :
et si j'exprimer
alors je trouve (ce qui est égale à P1*P2:
Conclusion
- La logique voudrais que ma matrice de passage de x'' vers x soit
- Quand je fais le calcul détaillé je trouve par contre
Pourriez vous m'expliquez svp pourquoi ces différences ?
Merci énormément
-----



 mais je bloque encore
mais je bloque encore