


Bonjour à tous,
Je me trouve confronté à un problème dans le cadre de l'asservissement d'un système en position.
Les actionneurs sont types hydrauliques (vérin ou moteur hydraulique) dont les positions sont relevés avec des capteurs de types potentiométriques.
Les consignes envoyés au systèmes sont des rampes en vitesses (donc des "S" en position)
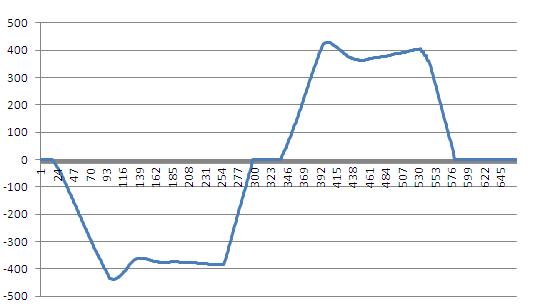
La réponse du système est plutôt bonne à un détail près : J'observe un dépassement de la commande lorsque j'arrive en fin de de rampe et que la vitesse de consigne se stabilise.
Forme de la commande :
Commande.JPG
J'utilise actuellement un régulateur prédictif. Il s'agit d' régulateur qui à partir d'un modèle anticipe le comportement du système. Ce type de modèle apporte un bonne robustesse et permet aussi d'avoir une bonne précision.
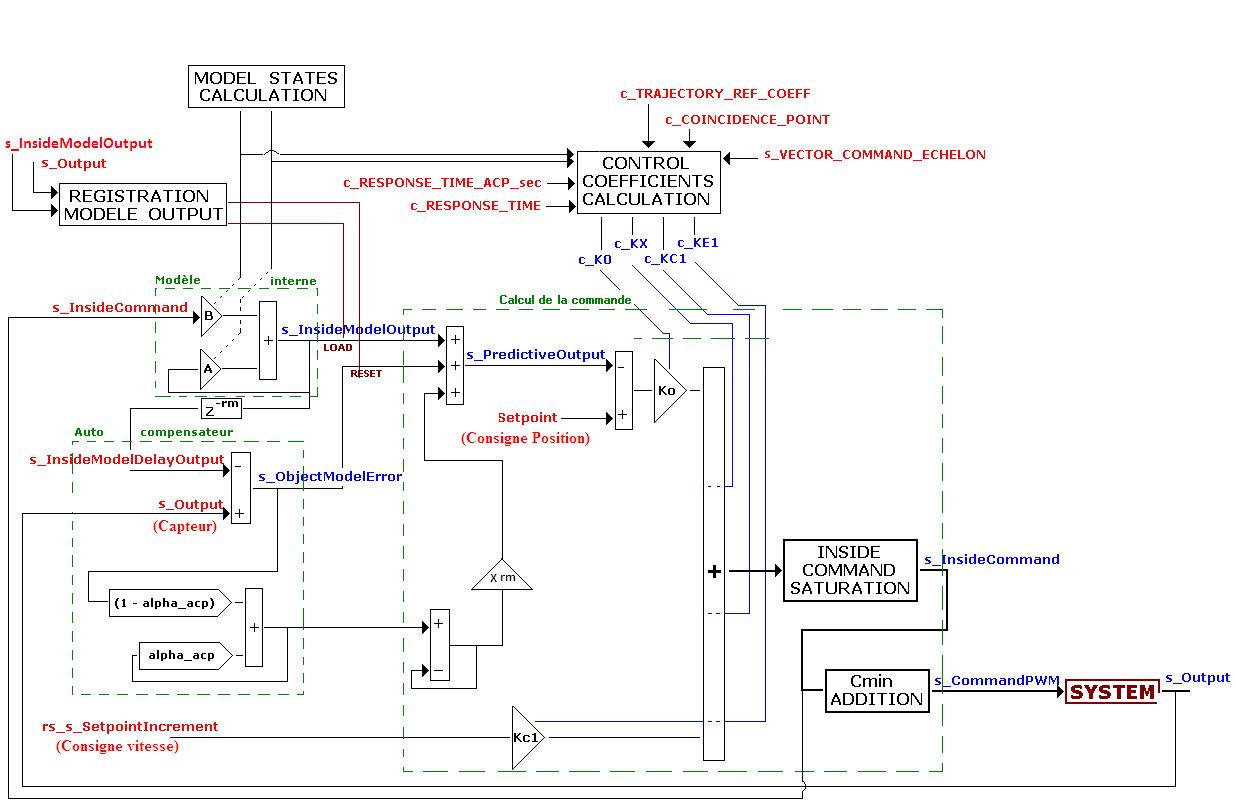
Ci dessous la structure du régulateur utilisé :
ModRegulateur.JPG
On trouve plusieurs composantes qui influent sur la commande :
- Le modèle interne
- L'erreur(du modèle par rapport au système)
- La dérive de l'erreur du modèle qui permet d'augmenter la précision dans les phases dynamique.
--> Ces trois valeurs sont additionné pour former la sortie prédite qui est comparé à la consigne.
- Et enfin l'ajout d'une composante proportionnelle à l'incrément pour une meilleure réactivité dans les phases dynamiques.
Si quelque un à des connaissance dans ce type d'asservissement, j'aurais souhaité savoir sur quelles paramètres je pouvais jouer ou quel type d'essais je pourais réaliser pour identifier et atténuer ce phénomène.
Aujourd'hui j'ai fais de nombreux essais en augmentant le TRBF (tps de réponse en boucle fermé) mais même en arrivant à une valeur élevée, j'observe toujours ce phénomène... (le TRBF intervient dans le calcul du gain du système)
Merci d'avance pour votre aide
-----

{kind=link}
{kind=link}