Bonjour à tous,
Je suis en possession d'une fonction de transfert décrivant le fonctionnement d'un piston d'une pelleteuse. J'ai pour mission de trouver le correcteur qui fera que mon système est stable>rapide>précis, et je suis un peu confus dans la méthode à suivre
.
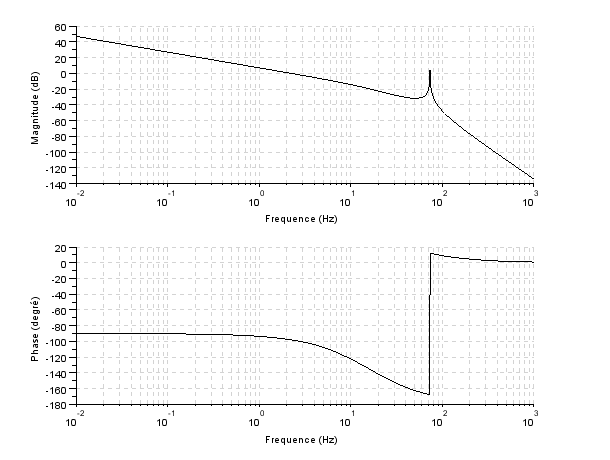
Voici ma fonction de transfert en Boucle Ouverte:
14.2
----------------------------------
p + 0.01p2 + 0.0000047p3 + 4.700D-08p4
Et voici le tracé Pièce jointe 187611
Internet foisonne de réponses "réglage à la bonne franquette en tournant les boutons I, D", mais je n'ai pas trouvé de méthode bien propre...
Il y a une histoire de marge de phase et de gain, mais supposons que je souhaite mettre en avant la stabilité. Ces deux simples critères de marge ne me renseignent pas sur le caractère prépondérant ou non de la stabilité. Quel sont les autres critères qu'il faut alors regarder? (Sinon un simple correcteur proportionnel suffirait à corriger tous les systèmes...)
Je cherche donc une méthode qui me permette de trouver ce fameux correcteur PID. Voire une plus complexe qui déboucherait sur un correcteur à avance, retard de phase?
Merci de votre attention et du temps que vous passerez à me répondre!
Antoine
-----