


Bonjour,
Pour mon projet, nous avons réaliser un robot explorateur qui marche plutôt bien.
Nous avons donc un problème, qui n'en n'est pas vraiment un, enfaite lorsque nous mettons le robot sur un plan incliné, du fait de sa masse arrière plus importante de la masse à l'avant, même après avoir ajouter 500g, le robot bascule vers l'arrière.
Nous n'allons pas tenter de le corrigé car le projet est trop avancé pour rééquilibrer les masses, mais nous voulons calculer l'angle maximale avant que celui-ci ne bascule vers l'arrière.
Avez vous une idée de la procédure à faire ?
XXXXXX hébergeement externe interdit XXXXXX
Vous avez de la chance, pour cette fois-ci j'insère l'image pour vous.
Pour la prochaine fois : http://forums.futura-sciences.com/ph...s-jointes.html
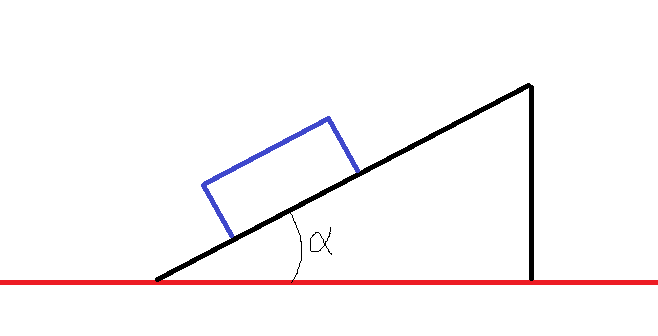
Voici un petit schéma pour illustrer le tout, donc en rouge, le sol, en noir le plan incliné et en bleu le robot qui avance sur ce plan incliné noir.
Ce que nous voulons, c'est calculer l'angle alpha avant le basculement, nous ne savons pas comment faire.
En espérant avoir des réponses claires et rapide.
Merci de votre lecture.
Cordialement,
Share.
-----