

Bonjour,
je suis en train de regarder quelque equations de mécanique et je voudrais faire une rotation d'une matrice.
Je me suis donc replonger dans les matrices de changement de base et j'ai trouvé deux démonstrations (cf. images ci dessous) :
Dans la première on exprime les vecteurs unitaires d'une base entre fonctions de ceux de l'autre base et on obtient:
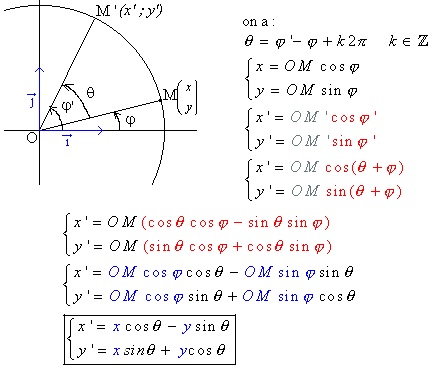
Dans la seconde on exprime les composantes d'un point en fonction des composantes d'une autre point et on obtient:
Je comprends les deux démonstrations ci dessous mais et ça me perturbe pas mal car de mes souvenirs je pensais vraiment retomber sur les mêmes expressionsD'ailleurs dans le cas 2 ça m'étonne de tomber là dessus.
= Sauriez vous m'expliquer "avec les mains" pourquoi cette différence ?
= et si je veux faire la rotation d'une matrice je dois donc utiliser l'expression 1 ou l'expression 2 ?
Démos:
matriceRotationVec.jpg
rotation.jpg
-----





{kind=link}
{kind=link}