

Bonjour à tous,
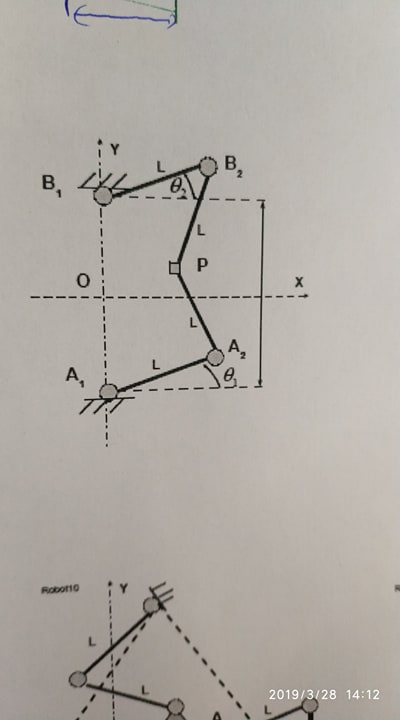
Dans le cadre d'un TP de robotique, il nous est demandé de réaliser le modèle géométrique direct et indirect du robot suivant:
Nous avons déjà déterminé la position du point A2 et du point B2 en fonction des Angles Téta 1 et Téta 2
Mais nous n'arrivons pas à trouver la position du point P
Je précise que le robot est piloté seulement avec les deux angles Téta1 et Téta 2, que les coordonnées de A1 et B1 sont connues ainsi que la longueur L (tous les bras sont de même longueur)
Avez vous des idées ?
Merci d'avance
-----