

Bonjour,
Je suis actuellement en classe de Terminale S, avec loption sciences de lingénieur. Avec cette option je dois au cours de lannée réaliser avec mon groupe un projet. Notre projet (ce nest pas important pour la suite du problème) est un sorte de poubelle intelligente, bref. Ma partie consiste à concevoir un système de détection dun déchet entrant dans cette poubelle. Et pour le BAC, mon système doit être capable de détecter un papier demballage (de MARS par exemple)
Au début de lannée, je pensais utiliser un système de capteurs ultrasons (HC-SR04). Jai effectué des tests et des calculs, et il savère que les capteurs ont une certaine latence ce qui fait que je ne pourrais pas détecter ce papier demballage. Lors de mes tests, jai disposé de manières différentes les capteurs, mais rien à faire, je pense que ce nest pas la bonne solution.
Alors, mon professeur me conseil dutiliser des capteurs infrarouges, je les utilise par paires, cest-à-dire que jen place lun en face de lautre ainsi, le capteur IR1 envoie un signal sur le IR2, et le IR2 envoie un signal sur le IR1. (Jespère être assez clair). Comme ça sur mon arduino je peux détecter si le signal est coupé et donc savoir si un déchet a été envoyé dans la poubelle ou non. Jai effectué des tests avec des boulettes de papier et cela fonctionnait.
Pour valider cette solution, je ne dois pas queffectuer de simples tests et vérifier sils sont concluants. Je dois alors faire une simulation de ma solution pour démontrer que cela fonctionne. Cette simulation est justement mon problème. Jai plusieurs outils pour faire cette simulation : jutilise un tableur Excel pour faire mes calculs et des graphiques.
Donc pour valider ma simulation il faut : que je prouve que mon papier est détecté par mon arduino. Par conséquent, je dois calculer le temps de réponse pour envoyer un signal comme quoi le capteur détecte un objet quelconque et calculer le temps que met un emballage pour traverser le signal infrarouge. Avec ces deux valeurs je les compare, si TempsRéponseCapteur < TempsChuteObjet alors ma solution est bonne et je peux détecter mon papier avec mon système.
Voici ce que jai effectué comme calculs :
Jai estimé la masse dun papier demballage (en aluminium) à 0.7g, la surface à plat du papier à 26cm² et un coefficient de résistance « aérodynamique » de 0.9
Mon professeur ma dit que pour calculer la vitesse maximale dun objet lors dune chute il fallait calculer la vitesse tel que :
P=R
Où P est le poids et R la force de résistance de lair
Et il ma dit que R=KSv²
Ainsi v=√((m*g)/(K*S))
Du coup jai quelques doutes à propos de cette formule car elle ninclut pas la densité de lair. Donc jai effectué quelques recherches et jobtiens la formule suivante :
√((2*m*g)/(K*p*S))
Avec :
m la masse = 0.0007kg
g laccélération de pesanteur = 9.81N.kg-1
K le coefficient de résistance « aérodynamique » = 0.9
p la masse volumique de lair = 1.293kg.m-3
S la surface de lobjet par rapport à un plan en m²
De plus lorsque quun morceau de papier est jeté dans la poubelle, il est souvent froissé donc dans mon calcul on inclura le pourcentage de surface restante. Les valeurs de ce pourcentage sont (1 ; 0.9 ; 0.8 ; 0.7 ; 0.6 ; 0.5 ; 0.4 ; 0.3 ; 0.2 ; 0.1). Le souci cest que lorsque lon froisse un morceau de papier, sa forme change donc le coefficient K varie également, donc pour chaque surface restante K = (0.9 ; 0.85 ; 0.8 ; 0.75 ; 0.7 ; 0.65 ; 0.6 ; 0.55 ; 0.5 ; 0.45) (pour le coup ici je suis vraiment pas sûr que cela puisse fonctionner car K=0.45 a une forme de sphère et je ne pense pas que lon puisse obtenir une sphère en froissant un papier jusquà obtenir 10% de sa surface).
Donc en effectuant le calcul jobtiens les valeurs de v :
pièce jointe 1.PNG
Pour obtenir le temps de chute de lobjet à travers le signal, japplique
t=d/v
Où d est la somme de la taille du signal et la taille de lobjet et v sa vitesse de chute
Pour obtenir d jai dit que mon papier nétait pas rectangulaire mais carré, donc pour obtenir sa taille jai faire racine(S). Pour la taille du signal jai dit quil correspond à la taille de lémetteur infrarouge donc 0.5mm
En appliquant ma formule précédente jobtiens
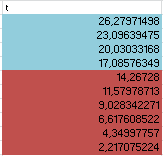
pièce jointe 2.PNG
t en ms
Pour calculer le temps de réponse de mon capteur infrarouge, jai fait un calcul dans mon programme : lorsquaucun objet nest détecté, jactualise une variable1 affichant le temps en ms depuis lallumage de larduino, puis lors de la détection dun objet, jaffecte le nouveau temps dans une variable2, puis je fais la soustraction de variable1-variable2 me donnant un temps de réponse de 16ms.
Si lon compare les valeurs de mes calculs on remarque que seuls les temps 26 ; 23 ; 20 et 17ms sont supérieurs à 16ms et par conséquent le papier est détecté pour 100% ; 90% ; 80% ; 70% de sa surface initiale.
Donc je suis venu vous solliciter votre aide, car je suis presque persuadé que mes calculs sont en partis faux car il y a trop de valeurs « à peu près ». Je pense aussi avoir trop de valeurs pouvant varier (coefficient de résistance aérodynamique).
Jai plusieurs questions : on est daccord que je ne peux pas obtenir 10% de la surface dun papier demballage du fait que le papier daluminium reprend une partie de sa forme initiale.
Donc jusquà combien de pourcentage de sa surface dois-je utiliser dans mes calculs ? Puis-je faire varier mon coefficient K comme je lai fait ici avec un simple tableau de proportionnalité ? la formule de mon professeur est-elle bien fausse ?
Je suis désolé pour le pavé que jai écrit, jai pensé que cétait mieux que vous compreniez toute ma démarche en détail. Excusez-moi pour les fautes dorthographe sil y en a.
Jespère être dans la bonne partie du forum trouver des réponses ici,
Merci.
{kind=link}
{kind=link}
-----