

Bonsoir,
je suis coincé sur une question d'un sujet de bac SI NC 2015 à propos de l'accéléromètre et je ne comprends rien du tout (généralement je comprends une partie mais là rien) je compte donc sur votre générosité intellectuelle pour m'éclairer. Voici le contexte et la question 25 :
q25.PNG
q25 2.PNG
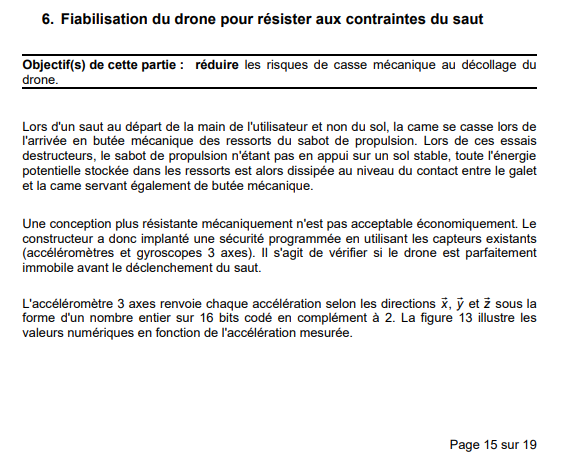
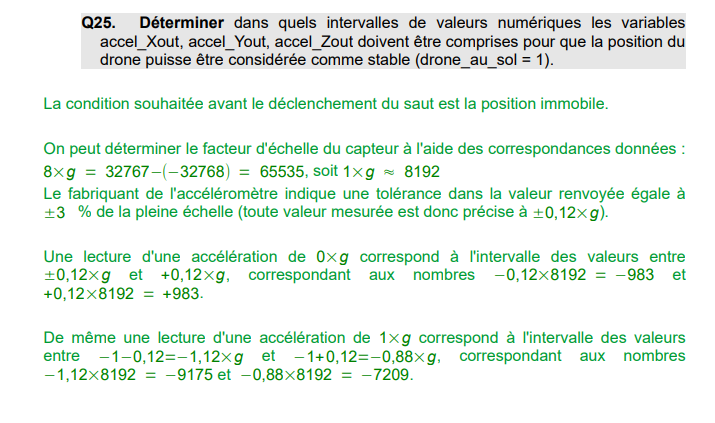
moi ma première intuition aurait été d'utiliser la décomposition du vecteur P selon les 3 axes, on sait que selon x et y, l'accélération =0 vu que la condition souhaitée est limmobilité du drone (d'après la formule du vecteur P justement) il faudrait seulement calculer pour z en tenant compte de l'incertitude donnée de 3%) mais dans la correction ce n'est pas du tout ça. là voici :
corrigé q25.PNG
du coup voilà j'aimerais voir comment vous pouvez expliquer cette correction sachant que je connais pratiquement rien sur les accéléromètre.
pour les curieux, voici le sujet entier et son corrigé intégral :
sujet : http://www.gecif.net/articles/genie_..._terrestre.pdf
corrigé : http://www.gecif.net/articles/genie_...correction.pdf
-----

{kind=link}
{kind=link}
{kind=link}