Bonjour à tous,
Je viens vers vous car j'ai une question, j'ai beau chercher partout mais je ne trouve aucune réponse:
Comment faire un retour d'état pour un système avec une entrée, une sortie et une perturbation ?
Le système sur lequel je travail est un moteur à courant continu. Mon objectif est de créer un système commandable en passant par la représentation d'état. Je vais vous faire un résumé de ce que j'ai fait pour l'instant, et en venir au problème où je bloque.
Principe de la représentation d'état et du retour d'état
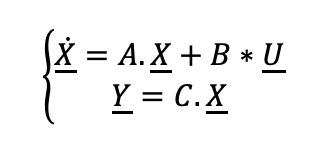
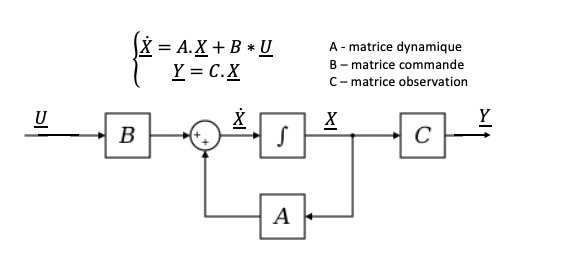
La représentation d'état permet de représenter sous forme de 2 expressions matricielles n'importe quelle système et de le modéliser comme cela:
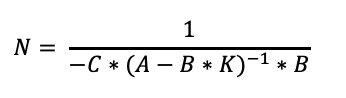
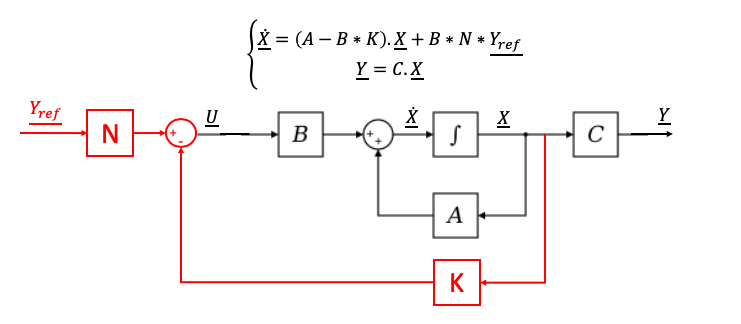
Si on souhaite commander ce système, on peut ajouter une matrice de gains K sur la boucle de retour qui va agir comme un correcteur proportionnel, et une autre matrice N qui va permettre d'annuler l'erreur statique en régime permanent. La modélisation de ce système devient donc:
Dans mon cas
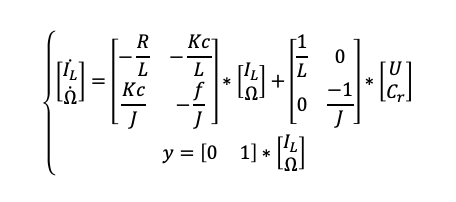
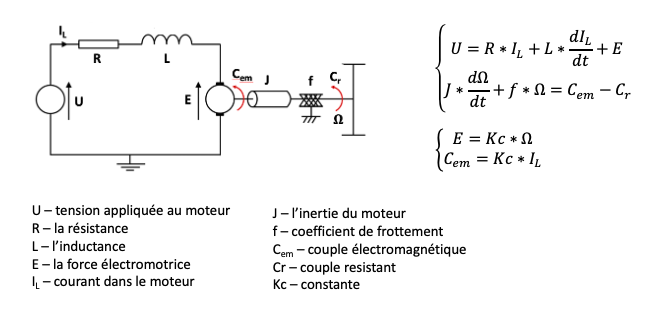
Je souhaite modéliser le moteur à courant continu. Le modèle et les expressions qui régissent sont fonctionnement sont les suivantes:
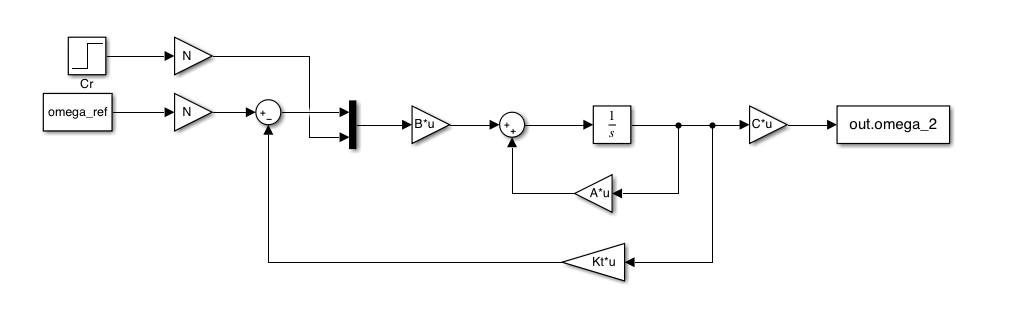
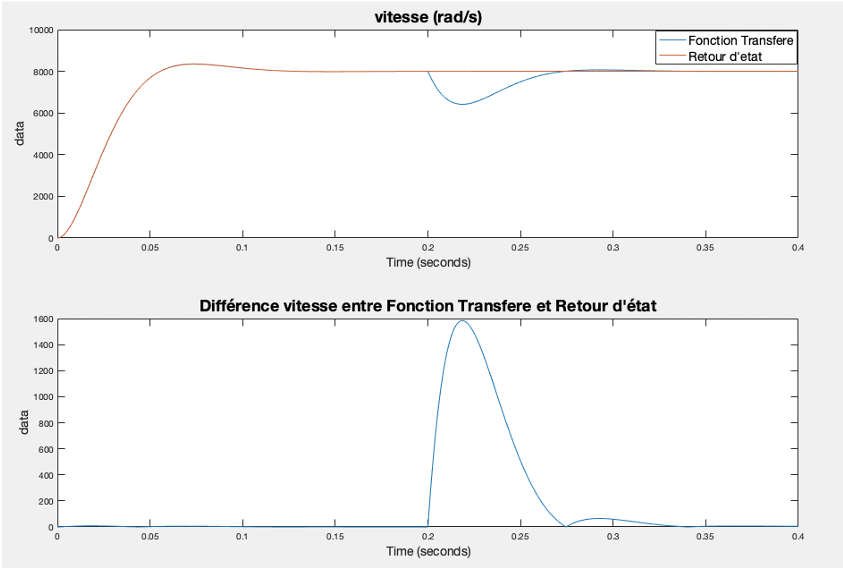
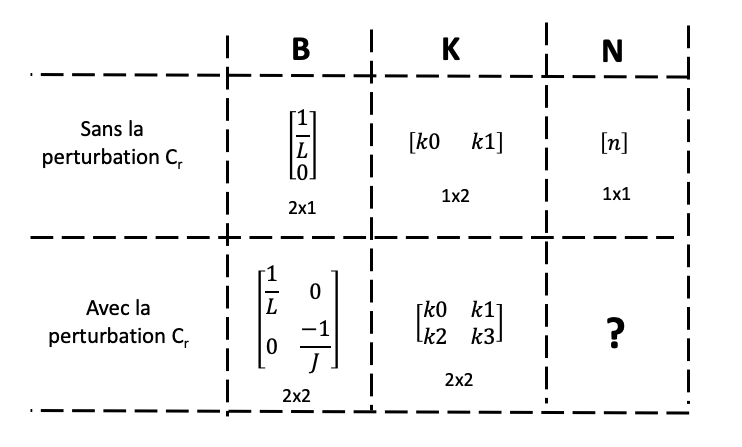
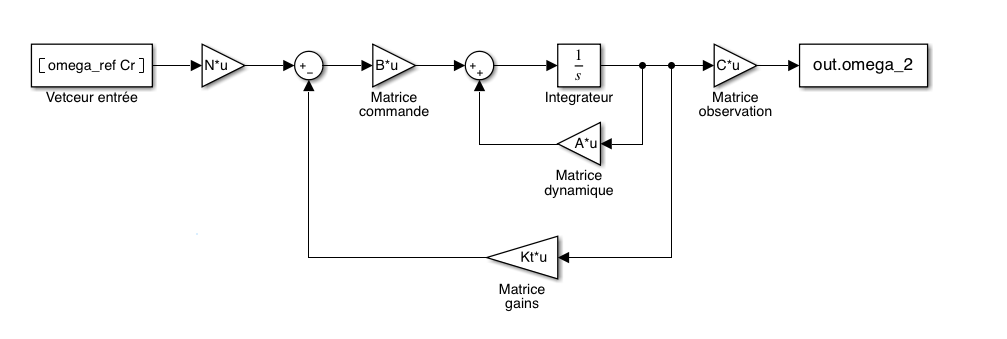
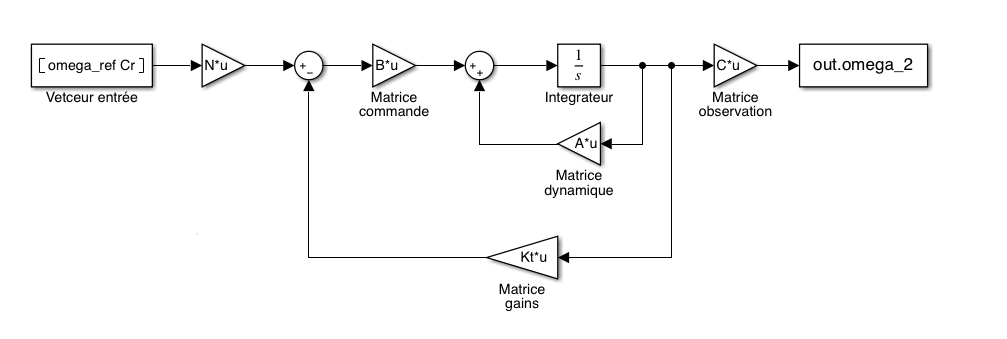
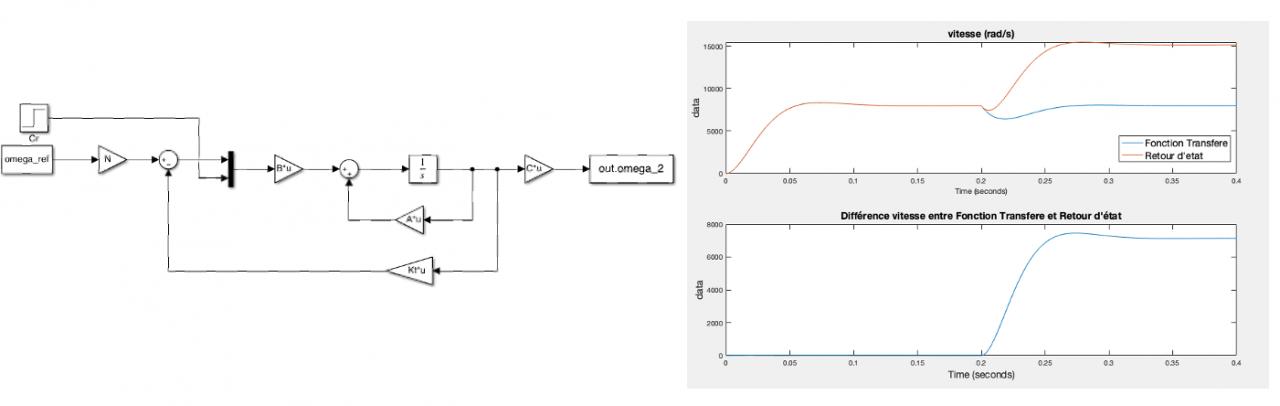
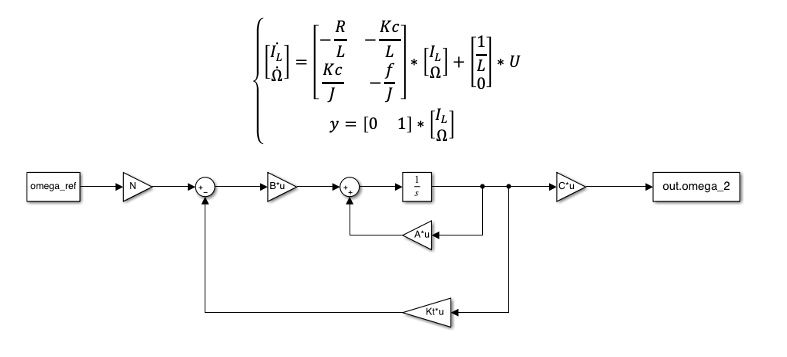
Dans un premier temps je n'ai pas pris en compte le couple résistant Cr, c'est cette perturbation qui me pose problème par la suite quand j'essaye de l'ajouter comme entrée du système pour mon retour d'état. Donc sans la perturbation Cr, tout fonctionne bien, j'ai cette représentation d'état avec cette modélisation faite sur MATLAB avec le retour d'état:
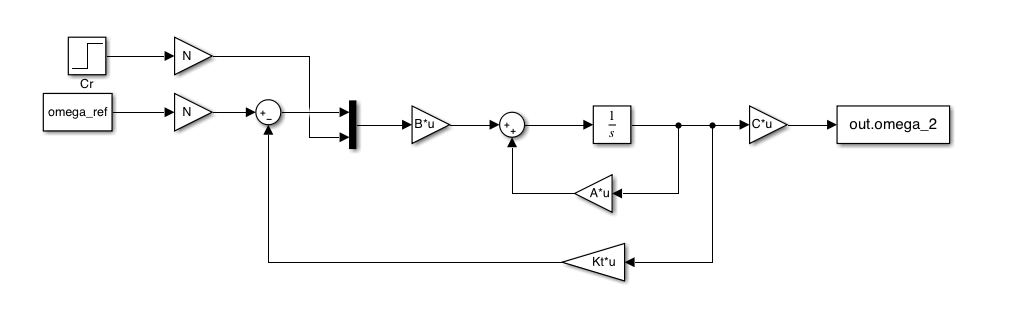
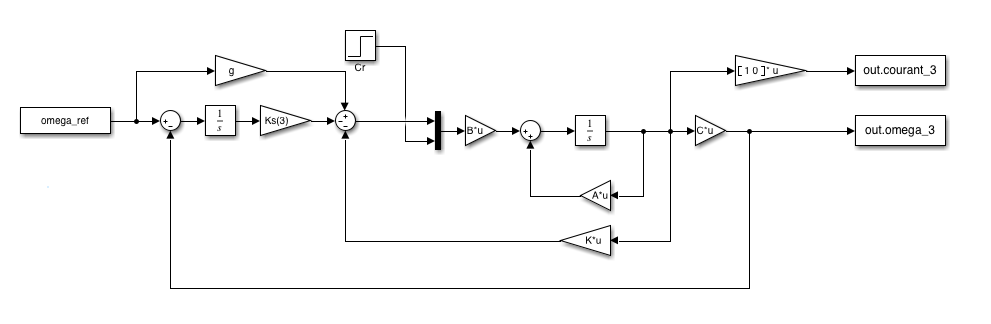
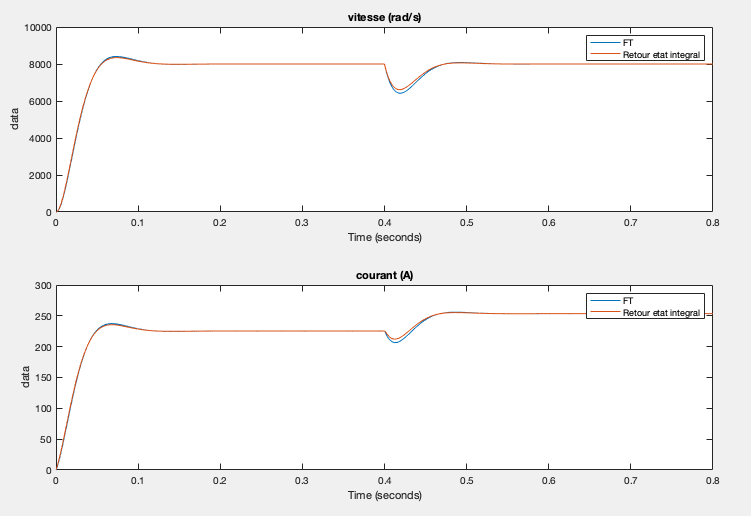
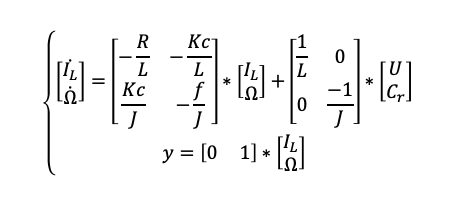
Ensuite je veux rajouter la perturbation Cr, j'ai donc la représentation d'état suivante:
Mais le problème se pose maintenant sur la modélisation, comment calculer les matrices de gains K et N ? Et comment raccorder l'entrée Cr dans le modèle ?
J'ai vraiment besoin d'aide, j'ai lu pleins de rapports de stage, de recherche à ce sujet mais aucun ne parle de ça ... Je vous remercie si vous pouvez m'éclairer !
-----