

Hello,
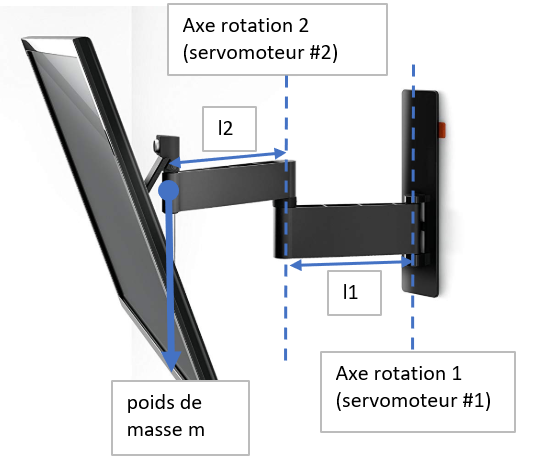
Je me lance dans un projet de fabrication d'un bras articulé motorisé, avec pour l'instant 2 degrés de liberté, comme suit:
Bras_articulé.png
Cela me permettra de gérer l'orientation de la TV et la distance entre la TV et le téléspectateur, afin d'avoir une visibilité optimale suivant où il se trouve dans la pièce (sur le canapé, sur la table haute, sur la table ou sur la terrasse)
Note: A terme, l'idéal sera également de gérer la hauteur et l'inclinaison de la TV, mais cela viendra plus tard en fonction du succès du 1er objectif.
Pour l'aspect électronique, pas de soucis, pour l'aspect mécanique, j'ai quelques doutes sur ma logique, faisant appel à de vieux souvenirs de mes cours de mécanique:
==> Quel couple sera nécessaire au servomoteur pour mettre en rotation l'ensemble sachant que:
- servomoteur de l'axe #1 nécessitera plus de couple, du fait de la totalité de la longueur du bras (l1 = 30cm et l2 = 30cm, donc ltotale = 60cm) : C = J.w'( PFD du moment) où C est le couple moteur à produire (en négligeant le couple résistant), J l'inertie de la masse à déplacer en bout de bras et w', l'accélération angulaire de la masse m
- sachant que le mouvement ne s'effectuera que dans le plan horizontal, le couple nécessaire à ce servomoteur sera de:
J = m*l² = 6 [kg] * 0,6 [m²] = 2,16 Kg.m² (données géométriques de mon système)
w max= 12°/sec : vitesse voulue : je souhaite avoir un mouvement autour de l'axe 1 d'angle de 120° en maximum 12 sec: dont 1 seconde pour l'accélération, 1 seconde pour la décélération, et donc 10 sec pour la vitesse constante soit 120° en 10sec (ces valeurs sont approximatives)
w' max = 12°/sec² (accélération voulue pour atteindre la vitesse constante , en 1 seconde)
Ainsi, Cmax = 2,16 [Kg.m²] *0,21 [rad/sec²] = 0,45 Nm (soit 4,6 Kg.cm).
Sachant que j'ai pour l'instant fait le choix et acheté le servomoteur usuel MG996r, qui peut produire 0,98Nm, pensez-vous qu'il pourra convenir?
De plus, pensez-vous que l'état d'équilibre pour conserver la position, quelque soit la position (bras tendu par exemple), sera maintenue en cessant d'alimenter les servomoteurs ? (mouvement de ballant dû à la masse accrochée au bout du bras)?
Pensez-vous que l'effort exercé sur le moteur 1 et créé par le bras de levier ne gênera pas la mise en rotation et nabîmera pas le servomoteur?
En vous remerciant,
-----



 )
)
{kind=link}