

Bonjour à tous !
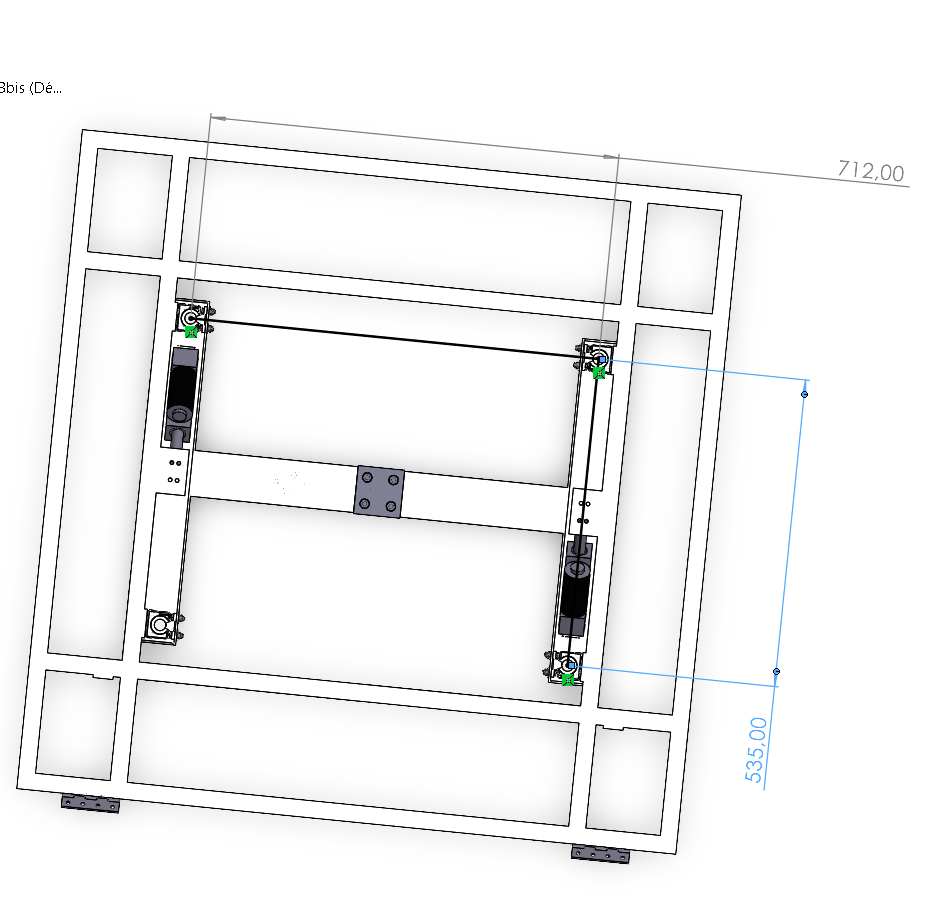
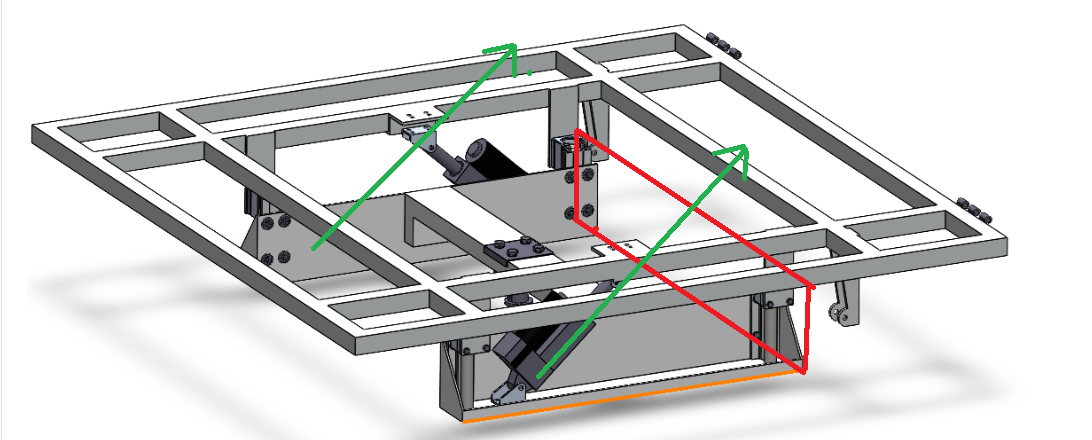
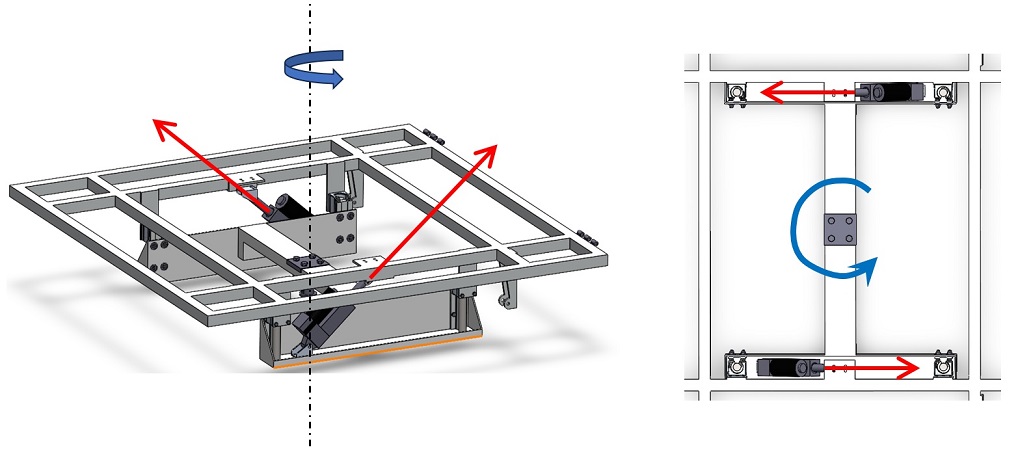
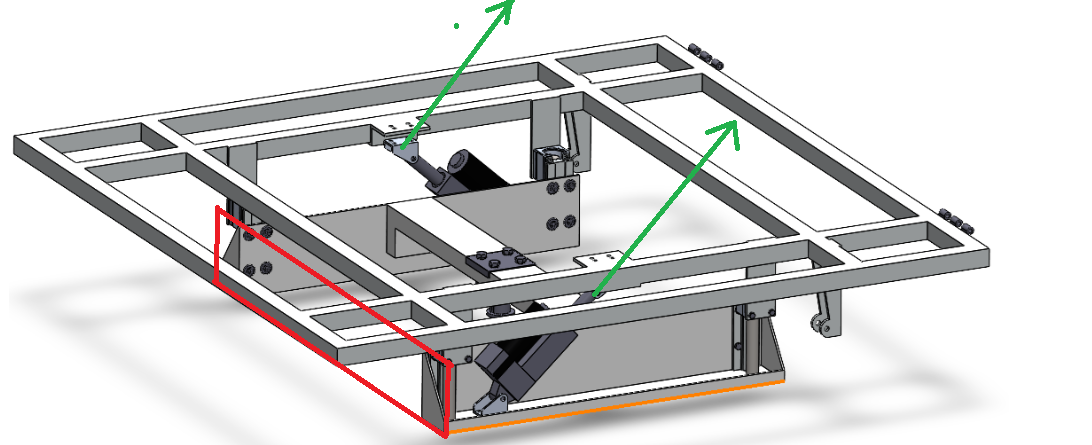
Jai réalisé un robot qui effectue une montée verticale en Z à laide de deux vérins équipés dencodeurs (pilotage synchrone).
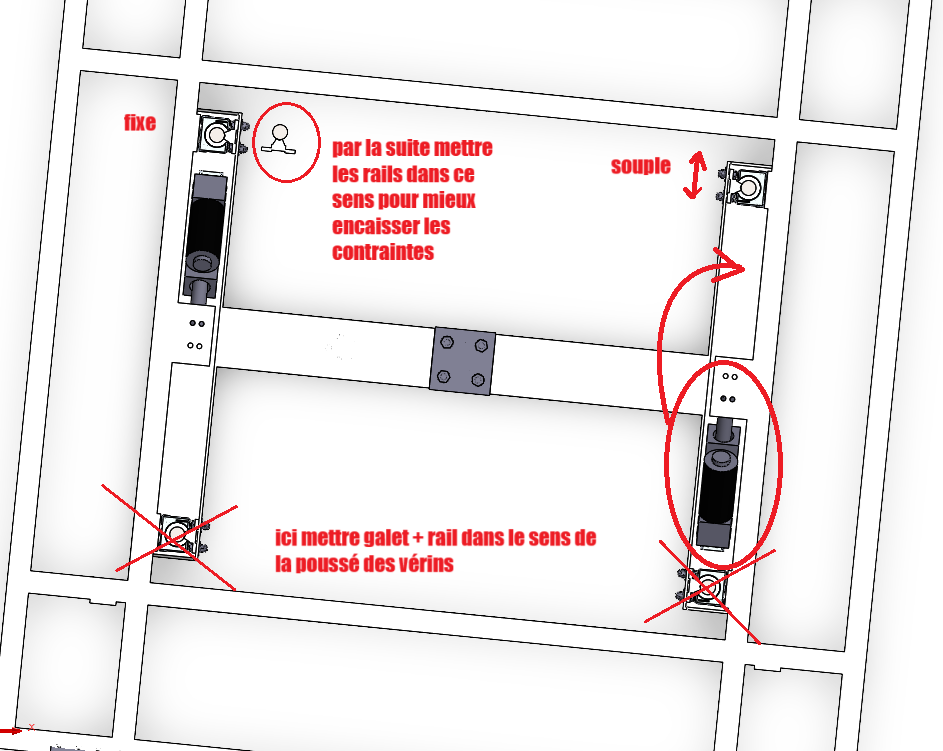
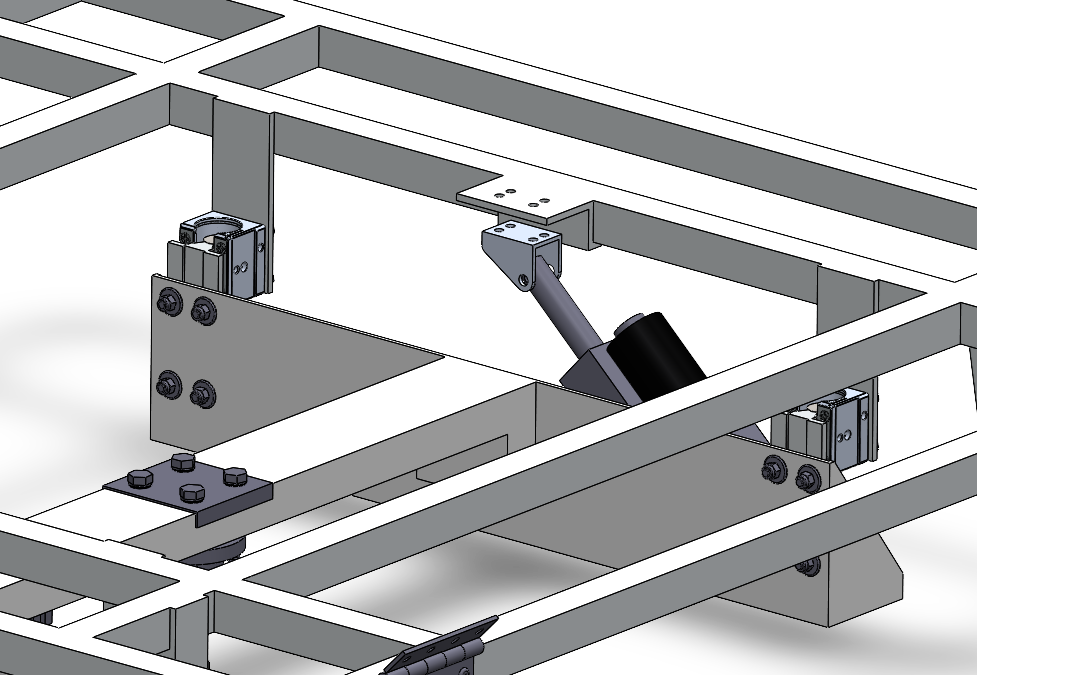
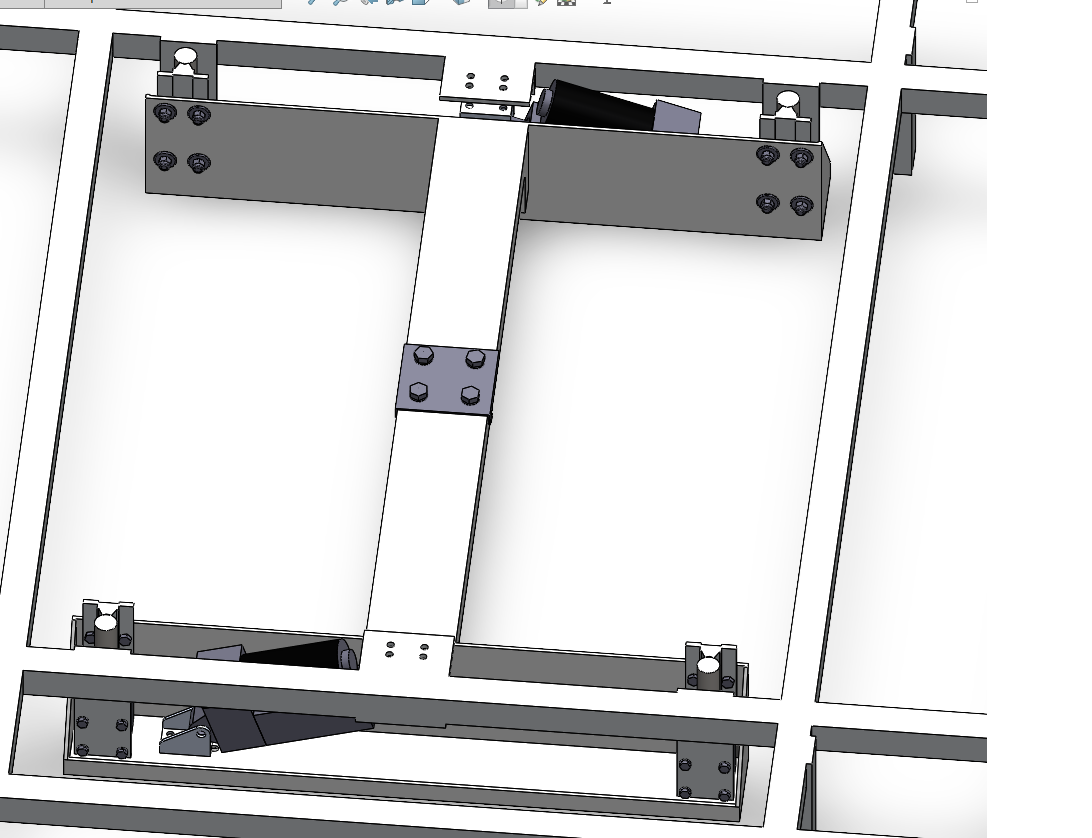
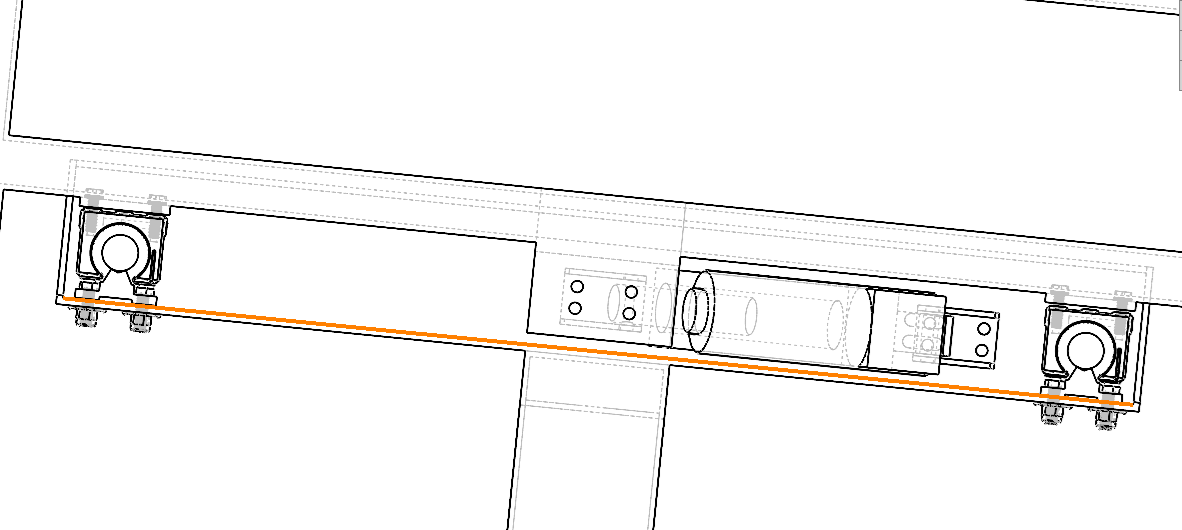
Le guidage est assuré par quatre rails SBR20.
Actuellement, la montée seffectue, mais mon système nest pas optimal : il nécessite un réglage trop fin, car jimpose trop de contraintes simultanées à cause des quatre rails SBR20.
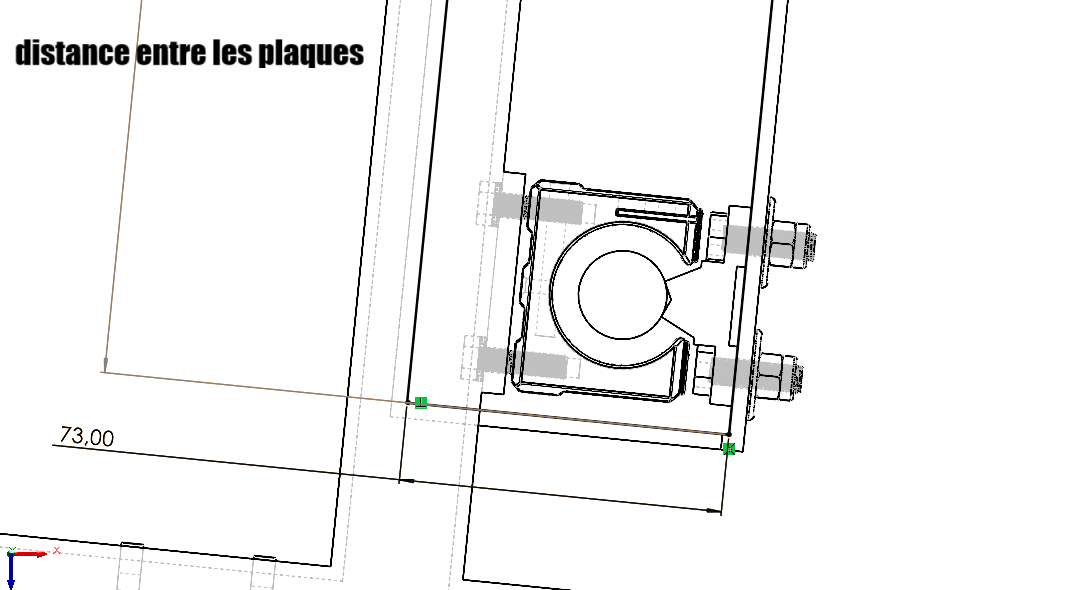
Après plusieurs (beaucoup ) recherches, jai découvert que ce type de système ne doit comporter quun seul rail maître au maximum, un second rail monté sur trous oblongs, et un ou deux stabilisateurs (par exemple des roulettes), sans que cela naffecte les degrés de liberté.
Mon objectif est de fluidifier la montée et déviter les réglages complexes, tout en conservant une stabilité exemplaire.
Jespère quil y aura parmi vous un super mécano , car on touche ici à de la mécanique de précision.
Je pense être proche de la solution ; jai quelques idées, mais je préfère ne pas faire refabriquer une pièce sans être sûr dêtre sur la bonne voie question de budget oblige
Merci davance pour laide que vous mapporterez !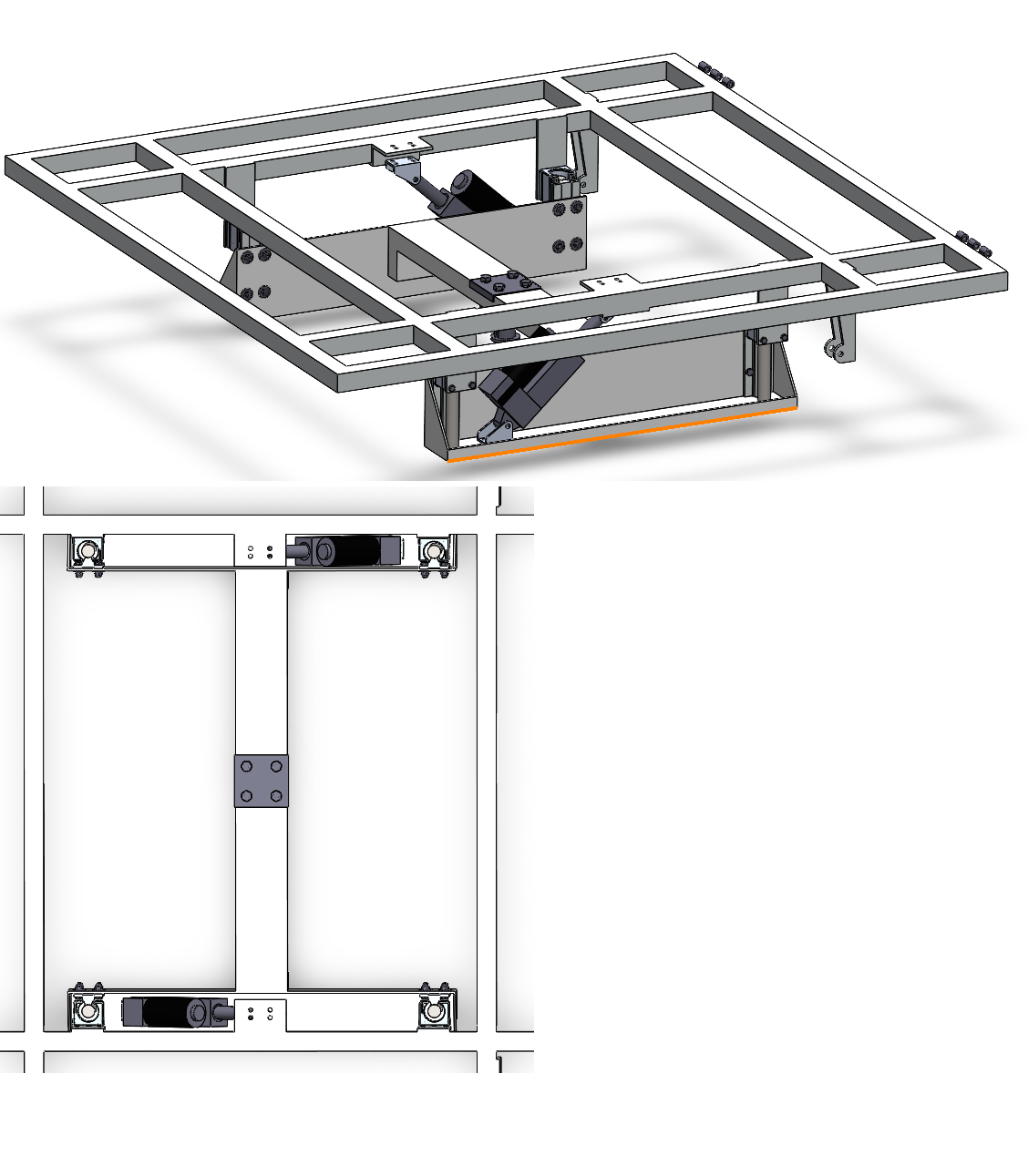
-----




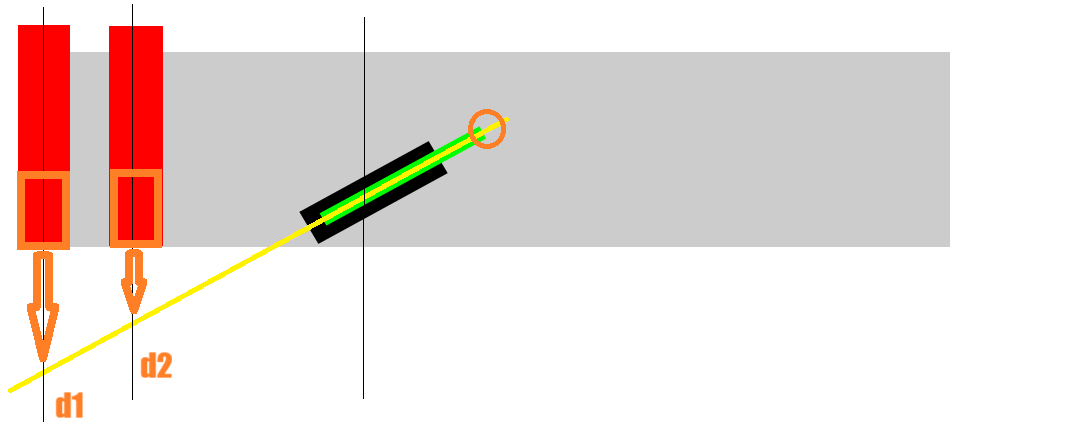
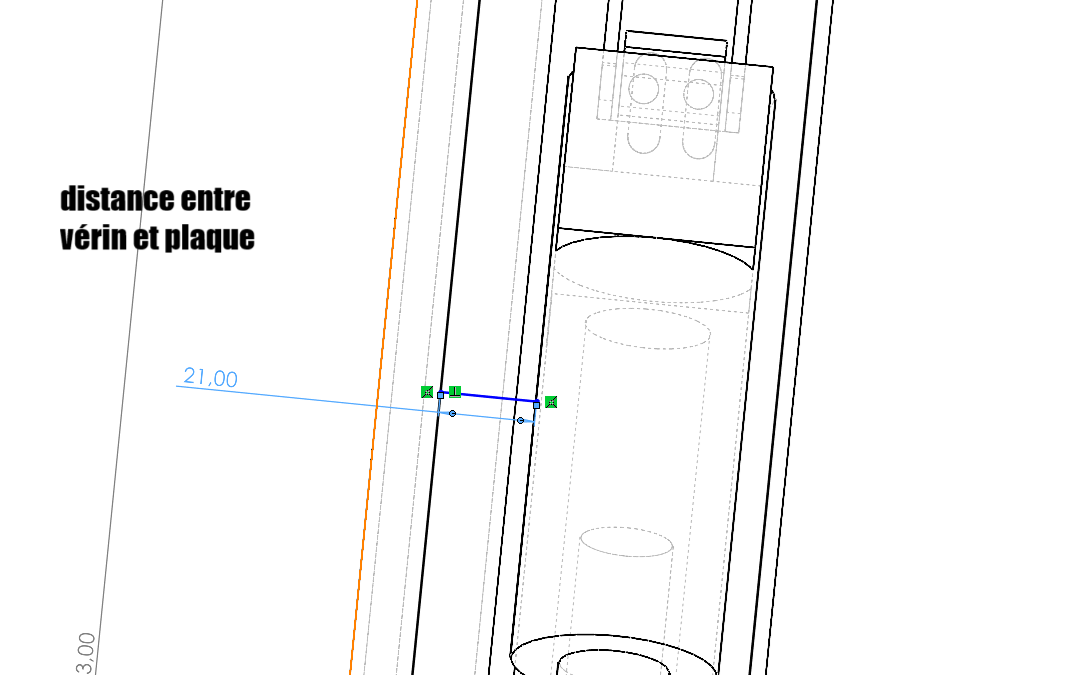
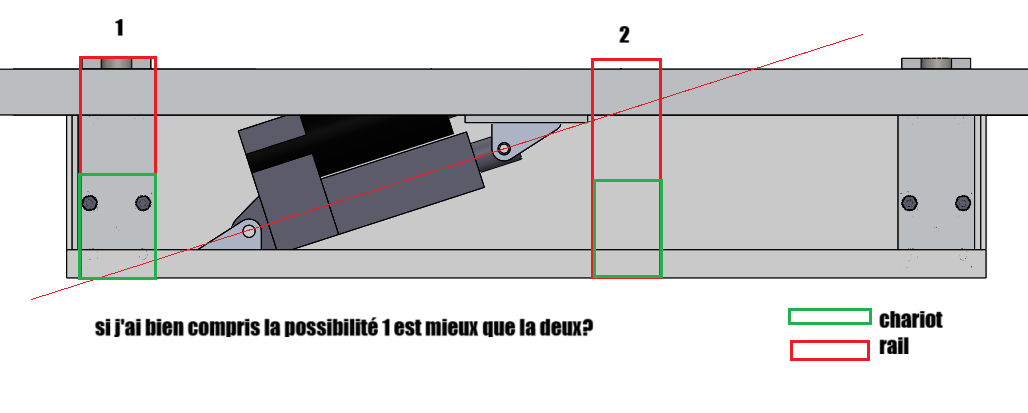 Donc, si je veux centrer ma bague sur la droite, la position 1 est mieux. Il restera le problème de stabilité.
Donc, si je veux centrer ma bague sur la droite, la position 1 est mieux. Il restera le problème de stabilité.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}