


bonjour,
je suis actuellement en train de construire un robot suiveur de ligne, mais le problème c'est que je débute du coup je maitrise pas trop le logiciel et les fonctions.
j'ai commencer un programme pour mon robot, pouvez vous me dire comment l'améliorer, s'il vous plait?
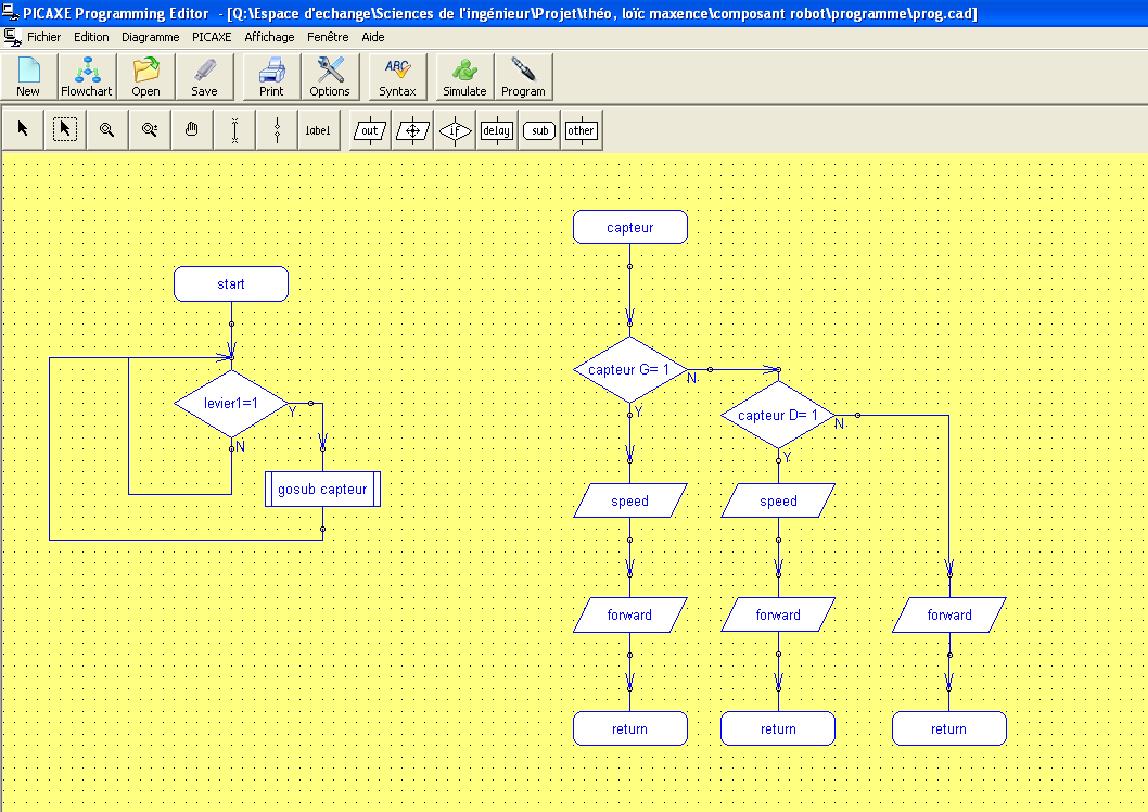
comme capteur j'ai pris les opb 711
http://www.optekinc.com/datasheets/opb711-712.pdf
et en carte picaxe28
http://www.picaxe.com/docs/axe020.pdf
merci
-----
 ) avec une indication, en bas, à gauche.
) avec une indication, en bas, à gauche.