Bonjour !
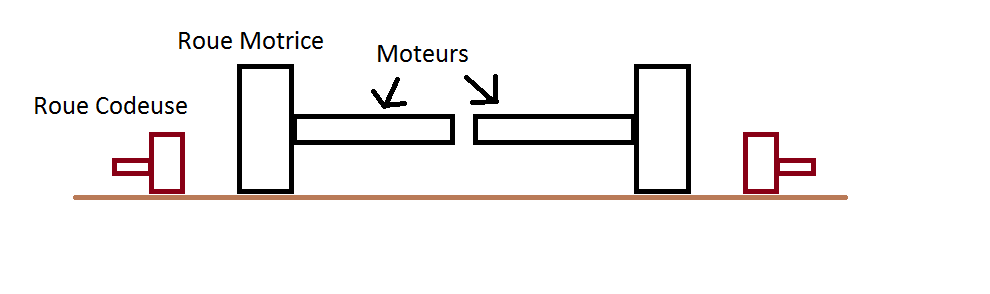
Je suis en train de réaliser un petit robot et j'ai réalisé un asservissement en alpha delta (ligne droite et rotation), avec l'implémentation du calcul de la position en XY de façon continue. Pour réaliser cela j'ai utilisé 2 codeurs avec 1440 tick/tour de roue. Ceux-ci sont bien positionnés dans l'axe de mes roues motrices.
Cependant pour le moment, j'ai une dérive assez importante sur ma position finale ( quelques centimètres au bout de 30s).
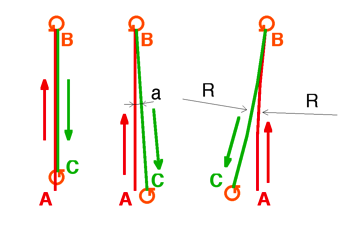
Pour calculer ma position j'effectue la méthode classique :
Theta += dThéta;
X = dDelta cos(Théta)
Y = dDelta sin(Théta)
Avez vous une idée d'où ce problème peut venir ?
Merci !
-----