


Bonjour,
Manquant cruellement de culture dans votre domaine, j'ai du mal à formuler mes recherches sur Google.
Quelqu'un pourrait-il me dire comment on appelle 2 composants qui peuvent se détecter à une distance déterminée
Je m'explique:
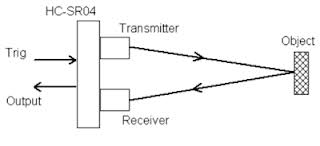
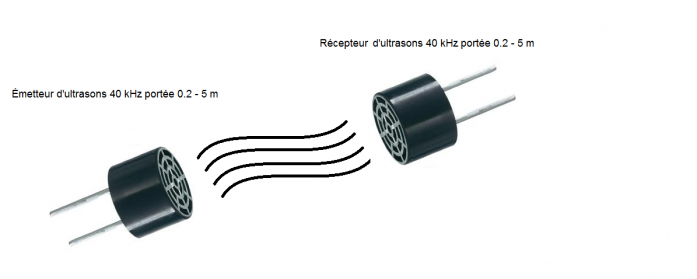
le 1er composant E contient un émetteur
le 2ème composant R contient un récepteur
E émet en permanence un signal (ultrason ou autre) sur un périmètre déterminé autour de lui (distance paramétrable si possible).
Quand R se rapproche à moins d'une certaine distance de E, R recoit le signal.
Il faudrait aussi, si possible une faible consommation d'énergie (petite pile Pile LR41 1,5 volt)
Merci beaucoup pour vos conseils!
Thierry
-----



{kind=link}
{kind=link}