

Bonjour
J'ouvre ce sujet pour vous montrer la radiocommande que je fabrique, boîtier, électronique, et logiciel sont faits à partir de zéro (pas de bibliothèque arduino, ni de bibliothèque avr, ni de bibliothèque c++ en supplément du langage lui même, ..), par contre je ne créé pas les manches de la radio (je n'avais qu'une semaine pour faire les usinages).
dsc06923.jpg
dsc06927.jpg
dsc07168.jpg
dsc07166.jpg
dsc07145.jpg
Le programme de cette radio fait 4036 lignes (et sera téléchargeable bientôt), le principe de ce programme est entièrement basé sur mon système que j'ai développé (MODULE), et est entièrement téléchargeable sur mon site (logiciel + plans des cartes).
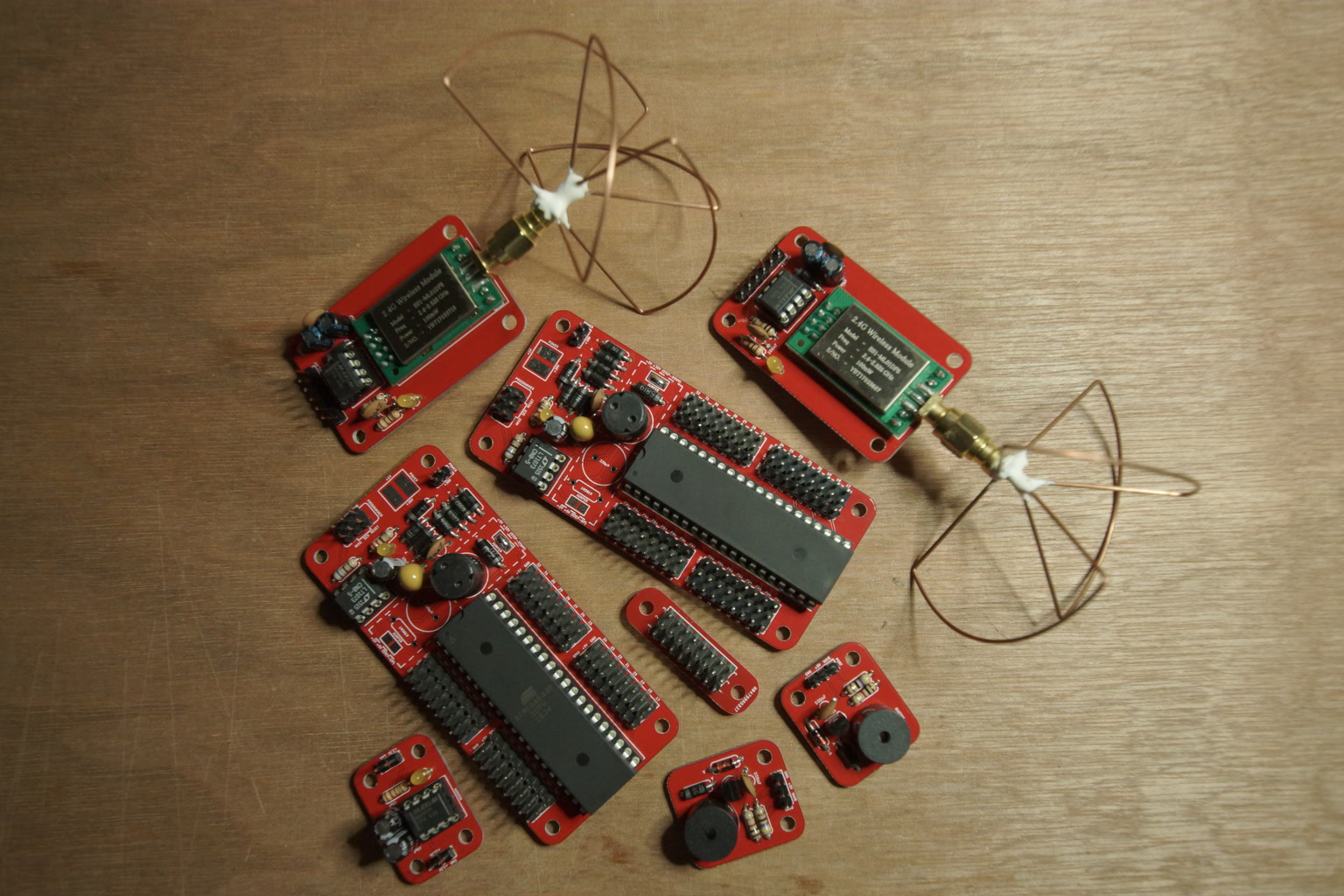
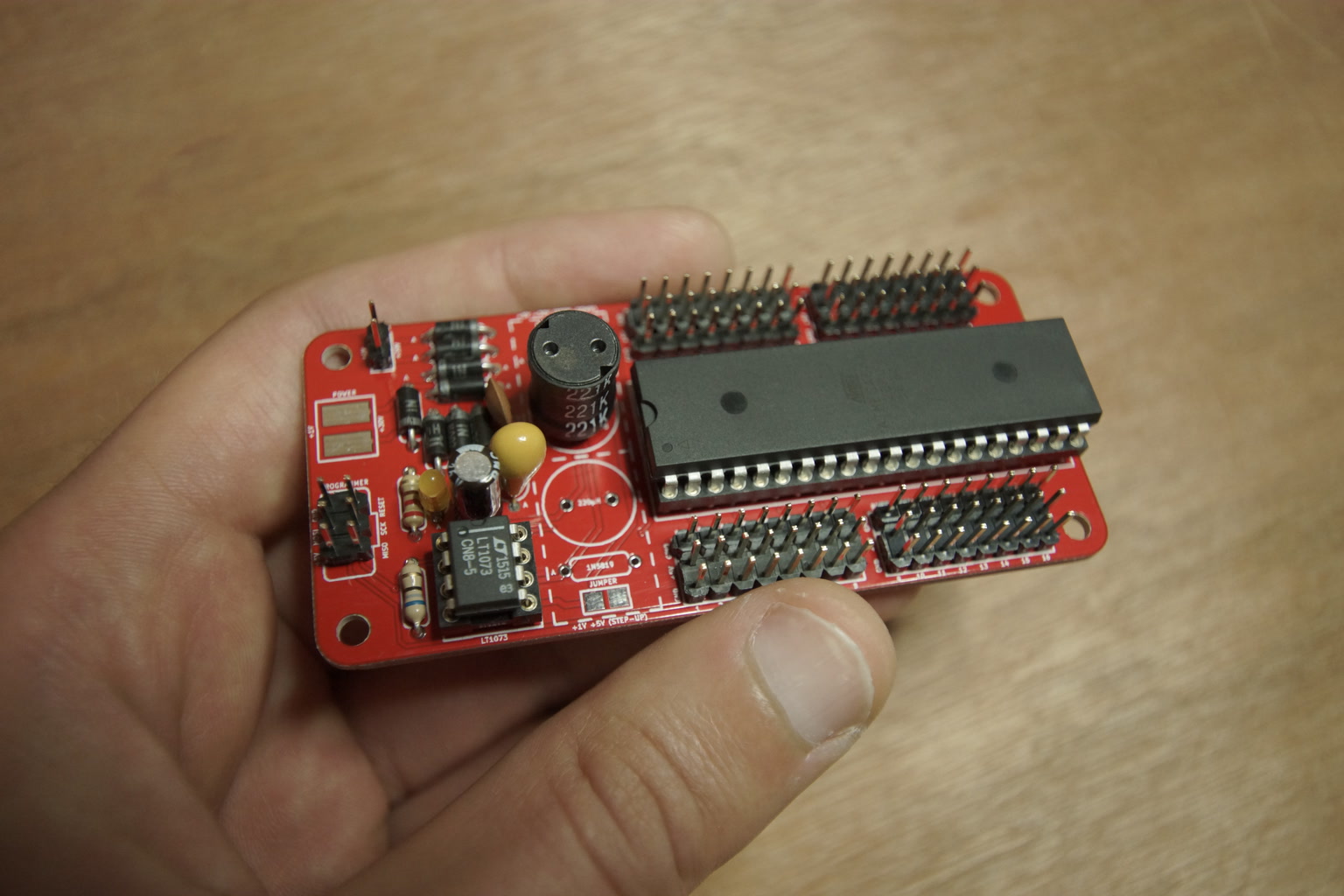
L'automate programmable est le MODULABLE M32, il est équipé de l'ATmega1284P.
Le composant qui fait la communication 2.4GHz est le nRF24L01+, mon système de programmation comporte une classe (Nrf24l01p.h) dédiée à ce composant.
Les caractéristiques de la radiocommande:
L'interface électromécanique entre l'homme et la machine:- Automate programmable MODULABLE M32 équipé du microcontrôleur ATmega1284P.
- Émetteur/récepteur radio 2.4Ghz (composant nRF24L01+, portée 1km environ).
- Communication bi-directionelle.
- Antenne Trèfle omnidirectionnelle 3 branches.
- Communication par trames de 32 bits.
- Affichage digital avec afficheur à digits MAX7219.
- Buzzer de signalement.
- Système à tolérance de pannes (fail-safe) envoyé au modèle sur 6 bits (0 à 63).
- 1 menu principal + 1 menu des paramètres/réglages.
- Réglage de la tension de batterie faible du modèle (de 0V à 100V).
- Réglage d'une temporisation (de 0s à 3600s).
- Aucune mémoire de modèles (la mémoire est située dans les modèles).
- Possibilité de copier les réglages d'un modèle vers un autre très facilement.
- Jusqu'à 16 paramètres/réglages personnalisés envoyés par le modèle.
- Verrouillage des menus (plus de réglages possibles, ni d'extinction de la radiocommande).
- Affichage de la tension de la batterie de la radiocommande.
- Alarme (visuelle et sonore) niveau de batterie faible de la radiocommande.
- Affichage de la tension de la batterie du modèle.
- Alarme (visuelle et sonore) niveau de batterie faible du modèle (si paramétrée).
- Affichage d'une temporisation (temps d'utilisation du modèle/autre).
- Affichage des trims (verrouillage et remise à 0 possible par le bouton de sélection).
- Affichage d'une télémétrie personnalisée.
- Affichage des paramètres/réglages personnalisés.
- Menu de mise à jour des paramètres/réglages du modèle.
- Allumage ou extinction de la radiocommande ou du modèle dans n'importe quel ordre.
- Accumulateur NIMH (+1.2V par élément) 8S 600mAh (+9.6V).
- Prise de charge de la batterie (XT30).
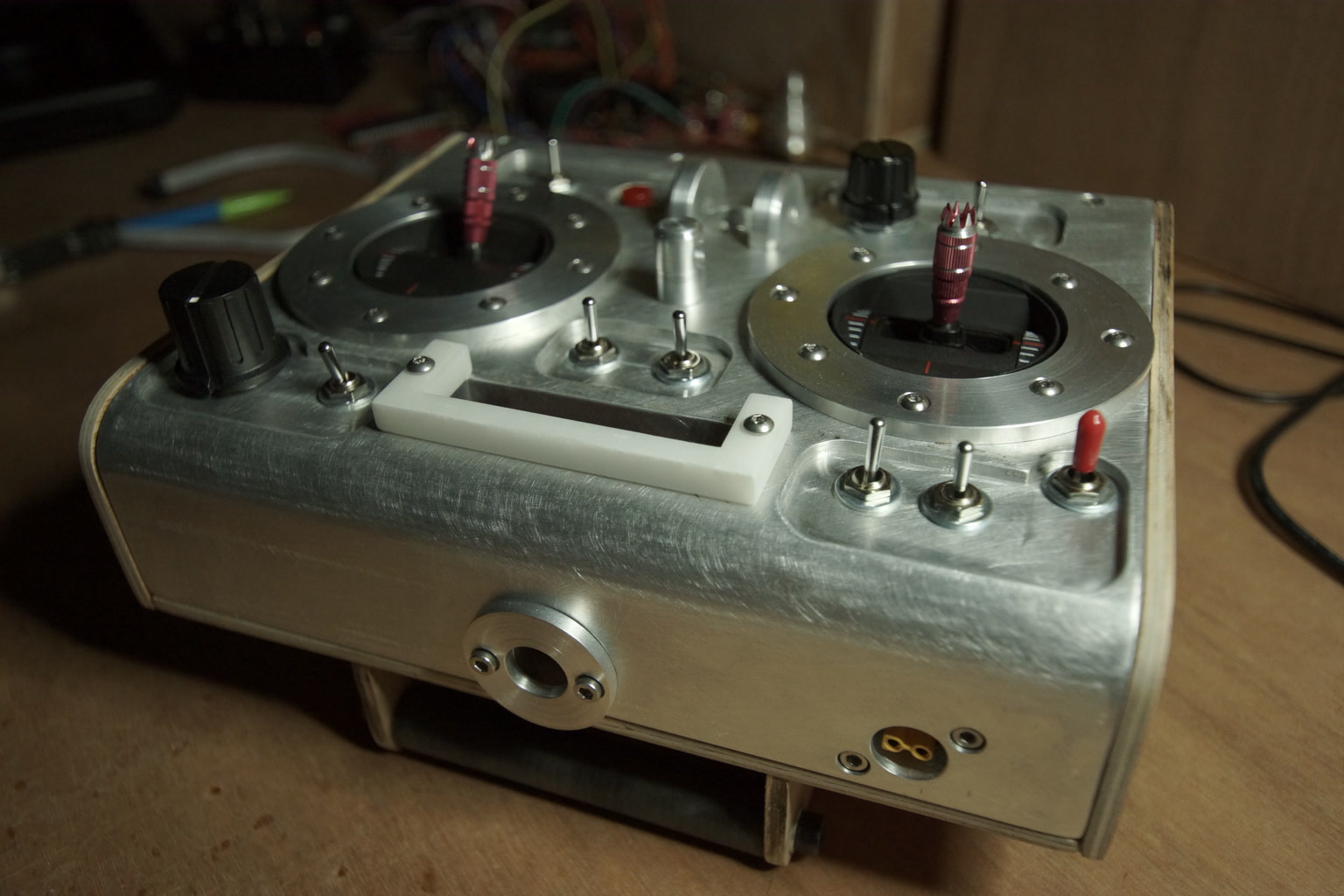
- Boîtier fermé en Aluminium, Acier inoxydable, bois (contreplaqué 5mm), et Ertalon.
- Dimensions: 214mm x 204mm x 117mm.
Le concept de cette radiocommande:- 2 manches analogiques (1 gaz/rouli + 1 tangage/lacet) sur 10 bits (0 à 1023).
- 4 interrupteurs de trims (3 positions) sur 2 bits chacun (0 à 2).
- 1 interrupteur de coupure moteur/autre (2 positions) sur 1 bit (0 à 1).
- 3 interrupteurs auxiliaires (3 positions) sur 2 bits chacun (0 à 2).
- 1 bouton rotatif auxiliaire sur 10 bits (0 à 1023).
- 1 bouton rotatif de sélection du menu sur 10 bits (0 à 1023).
- 1 bouton poussoir de sélection du menu (2 positions, dont 1 momentanée) sur 1 bit (0 à 1).
- 1 interrupteur d'alimentation maintenue on/off (2 positions).
Depuis les premiers temps ou je pilote des modèles radiocommandés dans des associations d'aéromodélisme jusqu'à aujourd'hui, je me suis souvent demandé et au vu de l'avancée précédente et actuelle en matière d'électronique embarquée:
À ce propos je ne citerais que l'exemple d'un ami au terrain de modélisme sans le nommer, qui par mégarde se trompe assez régulièrement de mémoire de modèles (il vol avec beaucoup de choses). En conséquence cela lui arrive souvent d'écraser ses réglages, ou d'écraser son modèle tout simplement au sens physique du terme !Mais pourquoi donc les radiocommandes du commerce ont'elle des mémoires de modèles ? Les mémoires de modèles permettent en effet de retenir les réglages relatifs à un modèle, dans la mémoire de la radiocommande.
En fait, cette "lacune" des mémoires de modèles dans les radiocommandes modernes trouve historiquement ses racines dans la conception même des premiers radio-émetteurs/récepteurs. En effet, les premières radiocommandes se contentaient uniquement d'être émetteur d'information, et le modèle étant lui simplement un récepteur. Dans cette situation (unidirectionnelle), il est facile de comprendre que le modèle reste toujours muet.
Plus tard, les concepteurs et divers industriels se sont décidés (au vue de la demande qui augmentait) à ajouter une communication du modèle vers la radiocommande, sur un circuit électronique bien distinct et avec une antenne radio supplémentaire sur le modèle et la radiocommande. C'est un retour air/sol qui a été appelé télémétrie (en rapport avec la télémétrie à l'époque des débuts de la conquête spatiale jusqu'à nos jours).
L'avancée en matière de miniaturisation des composants permet aujourd'hui d'avoir dans une même puce un émetteur et un récepteur, qui se sert de la même antenne radio pour communiquer, ces systèmes sont appelés tranceivers (émetteurs/récepteurs).Cette idée simple permet beaucoup de choses, notamment le fait que c'est le modèle qui envoi des paramètres et réglages personnalisés à la radiocommande, qui à l'origine dispose d'un menu des paramètres et réglages presque vide. La radiocommande se voit alors garnie de paramètres personnalisés relatifs au modèle qui est actuellement en communication avec elle. Elle dispose également de l'affichage de la tension de la batterie du modèle en temps réel, et d'une télémétrie personnalisée en fonction du modèle.Le concept que je développe ici permet de vous expliquer l'idée même de ma radiocommande, celle-ci n'a en effet aucune mémoire de modèles, aillant souhaité aller au bout de ma logique, c'est le modèle qui contient la mémoire !
Une fois cette notion comprise, tout est alors possible. Ma radiocommande dispose d'un maximum de 16 paramètres personnalisés par le modèle, ceci est largement suffisant parce que par définition même, ils sont spécifiques au modèle considéré.
Terminé les réglages et menus à n'en plus finir (souvent la plupart du temps inutilisés) dans les radiocommandes du commerce ! Dans ce que je propose ici, vous disposez des réglages uniquement nécessaires au modèle mis en oeuvre, ce qui facilite grandement son utilisation sur le terrain de modélisme !
Si vous souhaitez en savoir plus et avoir d'autres explications pour mieux comprendre ce projet, je ne peux que vous conseiller de lire l'article que j'ai écrit sur mon blog qui est un peu plus documenté (demandez moi les liens si besoin).
J'y explique par exemple "La copie des paramètres d'un modèle", ou bien encore "La vitesse de communication", ce qui peut vous intéresser !
N'hésitez pas si vous avez des questions
-----

 Super design !
Super design !

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}