
Bonjour,
Je voudrais fabriquer une butée manuelle qui lors de son déplacement entraînera un potentiomètre. Celui ci indiquera la valeur en millimètres sur un afficheur digits.
quelqu'un aurai t-il une proposition ou une autre technique.
Merci

-----

Bonjour,
Je voudrais fabriquer une butée manuelle qui lors de son déplacement entraînera un potentiomètre. Celui ci indiquera la valeur en millimètres sur un afficheur digits.
quelqu'un aurai t-il une proposition ou une autre technique.
Merci
Bonjour cricri8888 et bienvenue sur Futura,
Peux-tu détailler un peu le contexte de l'étude : bricolage personnel à la va-vite, projet scolaire... ?
Quelle est la distance que doit pouvoir parcourir le curseur du potentiomètre ?
Quelle précision espères-tu avoir ?
Pour notre curiosité, peux-tu détailler un peu l'application qui se cache derrière ?
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
c'est une application privé, j'ai un petit atelier chez moi ou je travail le bois. Sur ma scie à onglet, j'ai fait une table de coupe sur laquelle j'aimerais mettre cette butée. La longueur est de 2,50 mètres et la précision serait d'approcher le dixième.
Bonjour,
2500 mm ce n'est pas rien, un encodeur rotatif serait plus adapté.
Je suppose que tu veux prendre la mesure sur un axe rotatif ?
Si oui quel est le déplacement en mm pour 1 tour d'axe ?
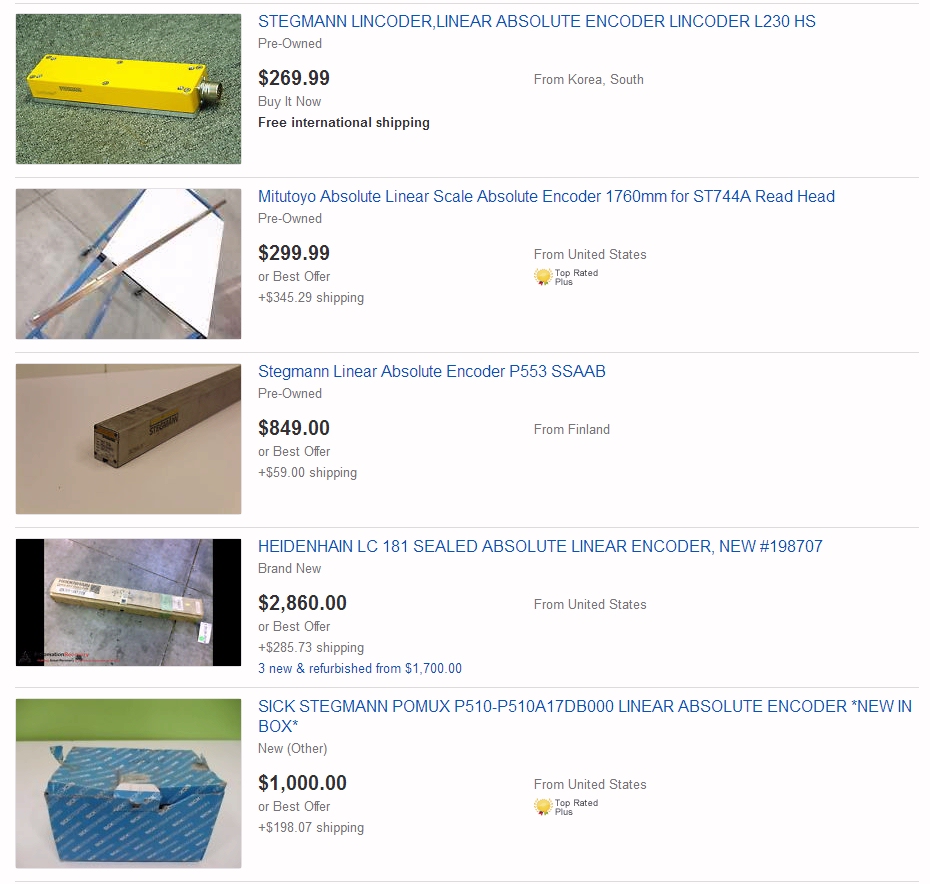
Tu trouvera des encodeurs sur EB à des prix raisonnables.
bonjour,
le 1/10em de quoi ? des 2,50m => 0,1 M... La longueur est de 2,50 mètres et la précision serait d'approcher le dixième.
ou le 1/10 de mm , de cm ?
un potar 10 tours accouplé au deplacement , mesure analogique par un petit MCU , genre 12F1840 DIP 8 pins
Affichage sur un LCD 2x16 cars en I2C
Mouvement lineaire à transformer en mouvement rotatif 2,50 M -> 10 tours
10T => pour 5V et pour 1024 points
0V calé mecaniquement sur l'origine
2500 cm pour 10 t
250 cm pour 1 T
250cm pour 102 points => +- 2,5cm par point
ou potar + 1 simple voltmetre digital calibré sur la course 0-5000mV lecture divisée par 2 pour 0 -2500
resolution : celle du voltmetre et de la linearité du potar.
ex: voltmetre 4000 points
Multimetre à 10 000 points !
Un encoder serait plus precis .. mais si +-2,5cm sont OK
L'encoder necessite un fin de course pour etablir le zero d'origine
Dernière modification par paulfjujo ; 06/12/2017 à 08h27.
Bonjour!
le 1/10em de quoi ? des 2,50m => 0,1 M
ou le 1/10 de mm , de cm ?
Comme il s'agit d'une table de découpe, disons le 1/10 de mm.
2500 cm pour 10 t
250 cm pour 1 T
250cm pour 102 points => +- 2,5cm par point
Petite erreur: 2m50, ça fait 250cm, pas 2500. Pour le reste, je suis d'accord, +/- 2.5mm par point.
Pascal
Si la précision est de 1/10 de mm ça fait 25 000 pas !
Pour un potentiomètre et un convertisseur A/D qui généralement font 1024 pas max et un potentiomètre qui risque de crachouiller (surement pas assez fiable) c est trop.
La solution est compteur d'impulsion.
Il faut un engrenage multiplicateur métal avec une précision au 1/100 mm.
qui risque de couter assez cher...
La solution économique serait d'utiliser un servo moteur avec des pignons métal , à l'envers en enlevant le moteur et en le remplaçant par un compteur de tours.
Il faudra une butée (contact de fin de course) de départ pour avoir une référence et compter à partir de ce point.
Les engrenages risquent de demander une certaine énergie pour tourner, à tester si c est viable.
On alors de la mécanique d'horlogerie... (un vieux réveil sur l'axe LOL)
Sinon on passe dans du matériel pro qui risque de couter cher.
Ce qui est étonnant c'est que généralement on prend le problème dans l'autre sens en mettant un moteur pas à pas et on compte les pas.
Mais bon comme d'hab , vu le nombre d'infos limitées...
Bonjour,
On trouve sans difficulté des ADC ayant bien plus de 10 bit, jusqu'à 24 ou 32 - La difficulté est alors dans la mise en uvre, du traitement du signal amont.
Ce n'est cependant, à mon avis, clairement pas une bonne idée, le bruit du au potentiomètre et à son environnement, associé à la linéarité du potentiomètre, rendrait la réalisation très ardue et/ou dispendieuse.
Compter les pas d'un moteur pas à pas (ou synchrone) pourrait convenir, à condition de ne pas sauter de pas.
Ajouter un codeur (incrémental s'il est possible de faire un RàZ au démarrage, absolu sinon) sur l'axe sera, à mon avis, la meilleure solution solution, tout en demandant peu d'efforts en électroniques.
Ces propositions (potentiomètre rotatif, encodeur rotatif) supposent que la "butée manuelle" est effectivement reliée à un axe, sans quoi il faudra s'intéresser à des codeurs linéaires.
Deux pattes c'est une diode, trois pattes c'est un transistor, quatre pattes c'est une vache.
Bonjour
Pour gagner en résolution sans augmenter les moyens, il faut une plage de mesure plus faible. Comme c'est pour du sciage l'utilisateur pourrait admettre de faire une course plus faible après avoir fait une coupe d'essai sur une chute auquel cas il ne fonctionnerait plus qu'en relatif en décalant sa butée de quelques mm.
Un potentiomètre s'il fait de nombreux tour finira par s'abimer si ce n'est la piste, la vis sans fin qui commande le curseur. En plus risque avec la poussière dans un atelier bois. Pourtant l'idée du multimètre serait astucieuse pour un prototype à condition d'en faire un usage moyen.
Si la butée était commandée par un système de vis écrou avec éventuellement une réduction du jeu , il n'y aurait plus qu'à récupérer le mouvement rotatif de la vis pour compter les impulsions. (Mais il y aurait du rattrapage de jeu comme sur une machine outil conventionnelle)
Dans les imprimantes usagées il y a des disques transparents gravés pour détecter le mouvement rotatif.
cdlt
Bonjour,
cm,mm
Grosse erreur ! surement parce que affecté par le déces de mon (notre) idole Johnny ..
0,1mm pour une course de 2500mm ..
en milieu industriel , on avait utilisé ceci pour positionner des lames de coupes sur un rouleau de 4M..
le fichier pdf ne passe pas ?
Regle lineaire MTS Sensor Temposonics R-serie Absolute, Non-Contact Position Sensors
MAGNETOSTRICTIVE PRINCIPLE
Sortie Analogique ou Profibus ou .. SSi avec indicateurTechnical Data
Input
Measured variables Position, Speed / Dual magnets position measurements
Measuring range Profile: 50 - 5000 mm, Rod: 50 - 7600 mm
Output
Voltage 0...10 / 10...0 / -10...+10 / +10...-10 VDC (min. load controller: > 5 kOhms)
Current 4(0)...20 mA / 20...4(0) mA (min/max. load: 0/500 Ohms)
Overvoltage protection up to 36 VDC
Accuracy
Position measurement:
- Null/Span adjustment 100 % of electrical stroke (Min. range 25 mm)
- Resolution 16 bit; 0,0015 % (Minimum 1 μm)
- Linearity < ± 0,01 % F.S. (Minimum ± 50 μm)
- Repeatability < ± 0,001 % F.S. (Minimum ± 1 μm)
- Hysteresis < 4 μm
- Update time 0,5 ms up to 1200 mm / 1,0 ms up to 2400 mm / 2,0 ms up to 4800 mm / 5,0 ms up to 7600 mm stroke length
- Ripple < 0,01 % F.S.
Speed measurement:
- Range 0,025 - 10 m/s
- Deviation < 0,5 %
- Resolution 0,1 mm/s Option 0,01 mm/s
- Update time (ms) see position measurement
Temperature coefficient < 30 ppm/°C
Operating conditions
Magnet speed any
Operating temperature -40 °C ... +75 °C
Dew point, humidity 90% rel. humidity, no condensation
Protection Profile: IP 65, Rod: IP 67, IP 68 for cable outlet
Shock test 100 g single hit, IEC-Standard 68-2-27
Vibration test 15 g / 10 - 2000 Hz, IEC-Standard 68-2-6
Standards, EMC test Electromagnetic emission EN 50081-1
Electromagnetic immunity EN 50082-2
EN 61000-4-2/3/4/6, Level 3/4, Criterium A, CE-qualified
Bonjour!
Bof, n'exagérons rien. Une erreur comme on en fait tous les jours avant de se frappercm,mm
Grosse erreur ! surement parce que affecté par le déces de mon (notre) idole Johnny ..
le front en disant quel con!
La règle linéaire est en effet une excellente solution, mais dans le cas présent,
c'est peut-être comme tuer une mouche avec un obus de 105. Et c'est clairement hors
de portée d'un hobbyiste.
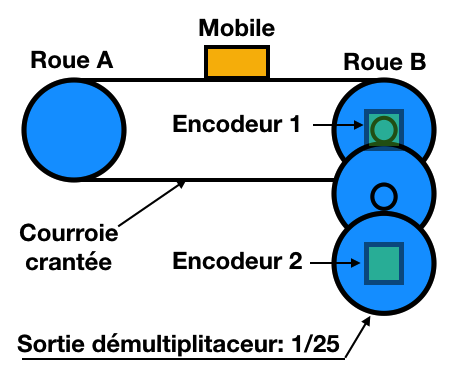
Les engrenages, dont il est question plus haut, c'est une très bonne solution. En
partant du principe que le mobile est relié à une courroie crantée entre deux pignons
(crantés évidemment). Prévoir un système d'engrenage avec une réduction de 1:25. Voici
le détail:
- Avec 2 pignons de 30 mm, un tour de pignon fait dans les 100 mm. Avec sur ce pignon
un aimant et un encodeur magnétique (très bon marché, moins de 10 euros pour l'aimant
et le chip), on récupère 10 bits par SPI. On peut donc avoir l'angle, donc la distance
linéaire locale. en 10 bits sur 100 mm de tour (30 de diamètre), on a une résolution
de 0.1mm. Mais avec rien que ça, on ne sait pas combien de tours le pignon de la courroie
a fait.
- Avec un réducteur de 1/25 (1/5 * 1/5 pour avoir des pignons de taille raisonnable),
et en mettant un encodeur (le même que ci-dessus) pour mesurer l'angle du 2ème pignon,
on connait le nombre de tours.
Exemple:
a = angle du premier pignon (qui tourne avec la courroie du mobile)
b = angle du 2ème pignon (celui qui tourne 1 tour pendant que le premier tourne 25 tours).
On a donc angle = 25 * b
mais a = angle mod 2pi (l'encodeur est absolu, mais pas multitours)
Donc par algorithme, il suffit de trouver n pour que 2*n*pi + a = 25 * b.
Et on va trouver une seule solution pour le nombre de tours du premier pignon,
donc on peut en déduire la position absolue sans avoir à retourner une butée
qui est un interrupteur, donc mécanique donc peu fiable et pas très précis.
NB: contrairement à ce qui est dit plus haut, les engrenages ne demandent aucune
énergie (du moins sans rapport avec les énergies mises en eu par une scie).
Maintenant, des pignons d'horlogerie, évidemment, ce serait une erreur.
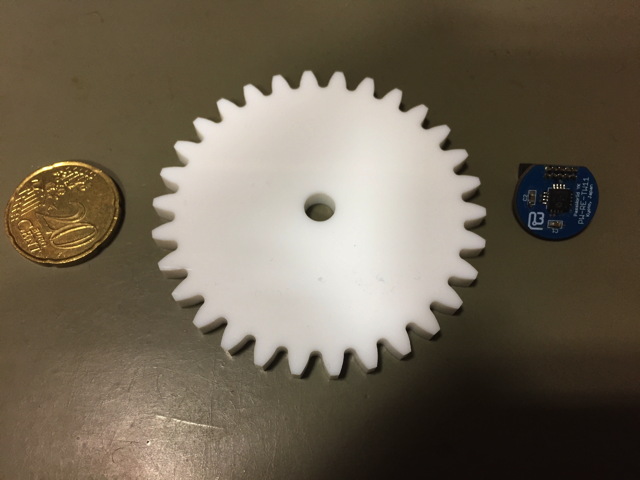
Je mettrais de gros pignons en plastique comme celui-ci (module 2, taillé à la fraiseuse
CNC dans une plaque de plexi blanc). En fait, plutôt que du plexi, le POM est bien mieux.
POM = nom donné ici au poly oxy méthyle, ou qq chose comme ça, je ne suis pas chimiste.
C'est très résitant à l'usure. Avec un gros module, il peut manger des copeaux sans problème.
Un coup d'air comprimé de temps en temps et c'est bon.
En résumant les avantages:
- Pas cher: dans les 10 ~ 20 euros pour les capteurs et aimants.
- Encodeur absolu: il est possible de connaître la position dès le démarrage, sans passer par une butée.
- Les encodeurs sont absolus sur 1 tour, et communiquent par SPI, donc compatibles
avec Arduino. Inutiile de s'occuper des phases AB pour lesquelles Arduino ne serait jamais assez rapide.
Inconvénients:
- Il faut trouver des pignons qui vont bien. Avec un rapport d'au moins 1/25 ou comme dit plus haut
au moins 1/5 * 1/5. Mais évidemment toute autre combinaison est correcte, comme par ex. 1/3 * 1/3 * 1/3.
Mais on en trouve sur le net en cherchant "plastic gears module 2". Ou module plus
gros, évidemment. Si vous connaissez quelqu'un dans une université qui a accès à une
CNC, c'est assez facile à faire.
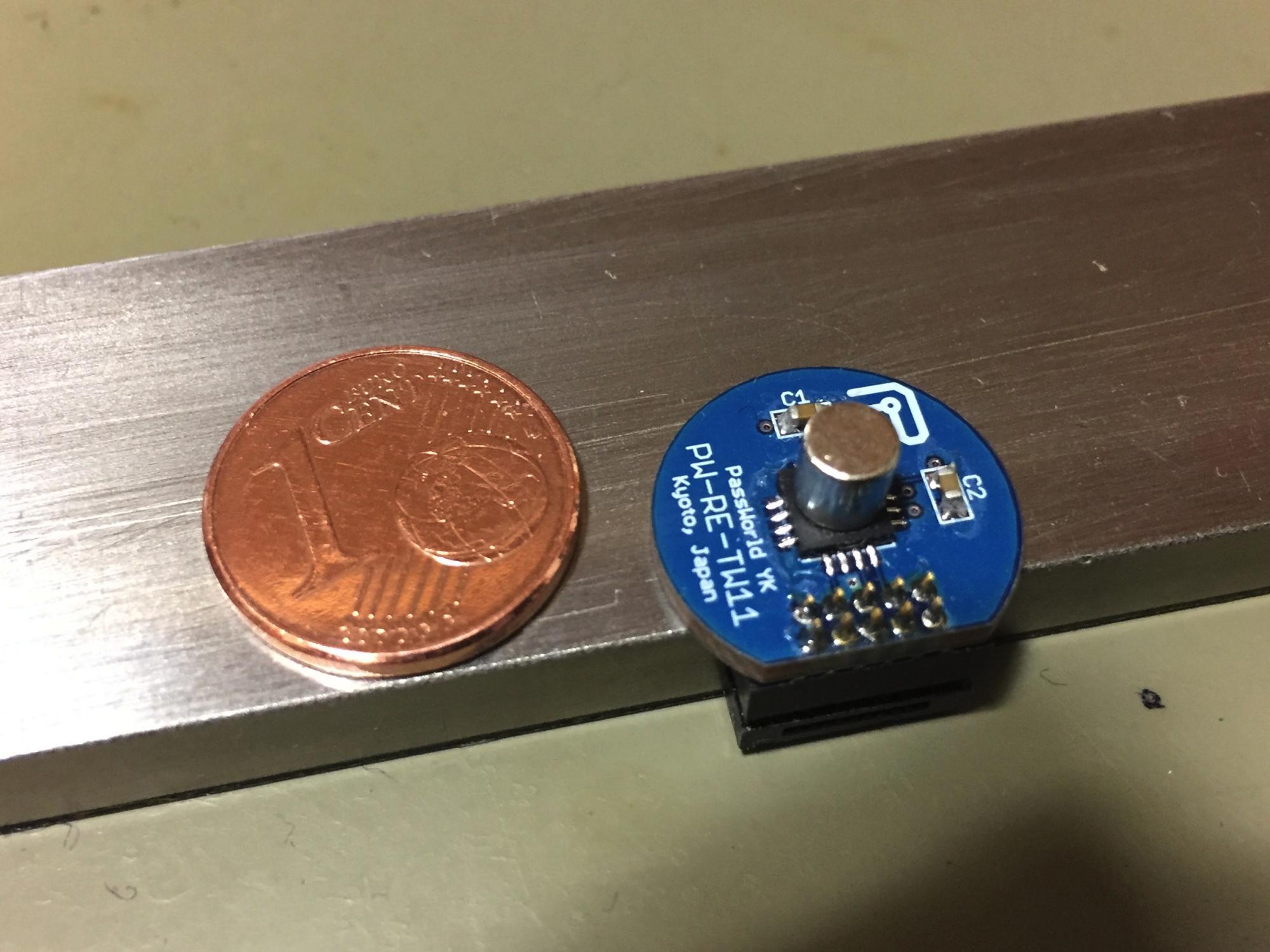
- Il faut souder le chip et ce n'est pas facile quand on n'a pas un bon fer à souder.
C'est un modèle sans pattes, mais avec tout de même le cuivre apparent, donc c'est faisable,
je l'ai fait, voir plus bas.
Notons que j'ai fait un circuit spécial, mais il est possible d'utiliser des adapteurs
standard QFN16 vers DIP 16 par exemple. Ensuite, il faut just câblee +V, GND, et le SPI.
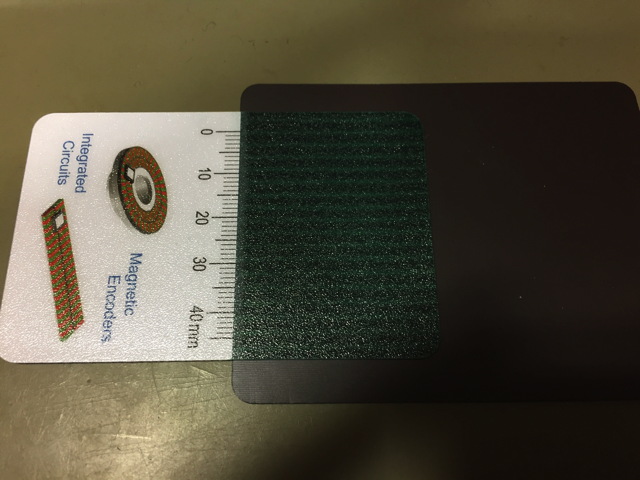
Photos jointes: vue d'un pignon en acrylique, module 2. Et le capteur magnétique.
Grossissement du capteur magnétique avec son aimant posé dessus.
IMG_2644.jpgIMG_2645.jpg
Voilà.
Pascal
Bonjour
J'avoue ne pas comprendre pourquoi vous avez besoin du deuxième pignon et encodeur, puisque les 2 sont solidaires avec une courroie crantée, lorsque le premier tourne par son diamètre vous savez de combien s'est déplacé la courroie?Envoyé par Murayama

cdlt
Pourquoi pas un télémètre laser ?
<< In a world without walls and fences, who needs Windows and Gates ? >>
Merci à tous pour vos réponses
C'est la première fois que je m'inscrit sur un forum, je ne sais pas trop comment ça se passe alors je vous remercie de votre indulgence.
Effectivement le dixième est le dixième de millimètre. Désolé pour cette erreur de ma part.
J'ai volontairement pas donné plus d'information sur le projet, car je recherche toute les solutions envisageables à moindre coût. J'utilise mon atelier comme hobby.
Je trace tous mes projets sous AutoCAD et j'ai l'habitude de travailler avec cette précision. C'est pour cette raison que je préfère un affichage digitale a un mètre à ruban. J'ai d'autre projet par la suite.
J'ai déjà équipé ma raboteuse d'un positionnement numérique avec un moteur pas à pas. J'ai un déplacement uniquement de 250 millimètres. Pourquoi pas faire la même chose sur 2500 millimètres.
Je pensais à une version plus simple, déplacer la butée manuellement avec un affichage digitale.
J'avais pensé à la crémaillère mais je trouve le déplacement long quand on veux passer d'une extrémité à l'autre.
L'idéal serait aussi de pouvoir réinitialiser le point 0 car la scie s'incline à gauche et à droite, ainsi que la lame.
Selon l'angle ou le double angle souhaité, le point 0 varie toujours. Pour info, la scie possède un affichage digitale
https://www.milwaukeetool.ca/fr/outi...trique/6955-20
Si quelqu'un a une solution pas trop onéreuse avec une carte arduino ou autre solution, je suis preneurs.
Bonjour!
Bon, les explications, c'est toujours plus délicat qu'un schéma, j'aurais dû commencer
par ça...
Dans le schéma suivant, on a une courroie crantée solidaire du mobile dont on veut
mesurer la postion. Dans l'explication ci-dessus, j'ai mis arbitrairement les diamètres
à 30 mm parce que 30 pi est proche de 100. Bon disons 32, ce sera plus proche.
On sait donc que 1 tour de la roue B correspond en gros à 100 mm de déplacement du
mobile. Comme c'est un encodeur absolu, on connaît la position au démarrage, mais
à n x 100 mm près. Les encodeurs sont représentés en semi-transparent pour qu'il soit
possible de voir le rond des petits pignons.
screenshot_982.png
À ce point là (encodeur 1 uniquement), il y a une approche qui consiste à mettre une
butée quelque part, et aller vers la butée au démarrage. Ensuite, par software, on remet
le compteur à 0, et on démarre de là. Solution complètement gérable même par Arduino.
Ce qui fait qu'un seul encodeur suffirait.
Ce que je proposais là, c'était un encodeur multitours (à 25 tours), donc absolu
sur 25 x 100 mm = 2m50. Ce qui fait que quand on allume la machine, il n'est pas besoin
de chercher le 0, on sait immédiatement où on est. J'ai schématisé par des petites roues
qui en entrainent des grandes. Ce n'est pas à l'échelle, mais si vous avez 2 fois un
rapport de 1/5, alors vous pouvez couvrir les 2.5m. La lecture est en SPI, c'est aussi
complètement gérable par Arduino.
Si le calcul que j'ai fait est un peu abstrait, alors voici du concret:
Au démarrage, admettons qu'on a l'encodeur 2 qui est à 750 (sur 1024).
On va donc s'attendre à une distance autour de 25 * 750/1024. Ça fait 18.3 tours.
Donc un peu plus de 18 tours.
Dans ce cas là, on sait que la roue B est à environ 18 tours de l'origine (je rappelle
que j'ai postulé que 1 tour = 100 mm. Dans la vie réelle, il faut évidemment utiliser
la vraie circonférence du pignon, soit le nombre de dents * le pas).
On lit maintenant la roue B qui dit par exemple 325. On peut alors calculer que
le mobile est à [18 + (325/1024)] tours du début.
Donc connaissant la valeur d'un tour, je peux calculer la distance directement sans
retourner à l'origine. Avec 100 mm, on a donc 100 * [18 + (325/1024)] soit 183.17mm.
Résolution: on est à 10 bits pour l'encodeur pour une distance de 100 mm par tour,
ce qui par approximation donne une résolution de 0.1mm. On peut donc arrondir à 183.2mm
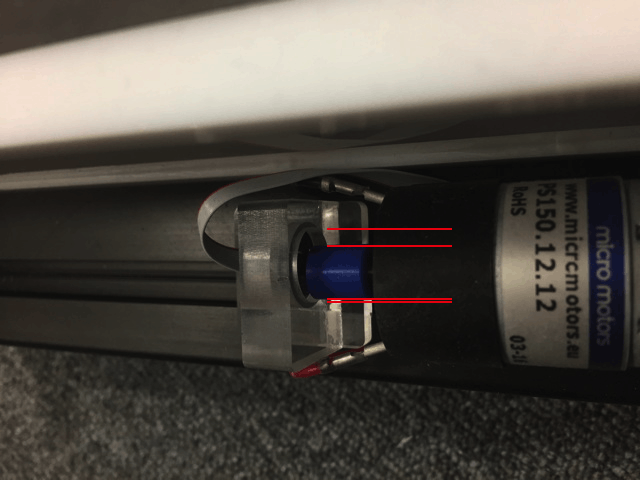
Le chip employé ne demande aucune connaissance. Vous le mettez en face de l'aimant et
vous lisez l'angle par SPI, point barre. De plus il est extrêmement tolérant comme le montrent
les photos ci-dessous:
IMG_2648.jpgscreenshot_984.png
Celle de gauche, c'est un appareil de mesure que j'ai fait il y a quelques années.
On voit par réflexion l'air conditionné au plafond, par ma manie de faire des capots noir laqué...
La photo de droite montre la pièce qui contient l'aimant. On voit l'excentrage (accidentel) par
rapport au support du PCB, en plexiglas. Je me suis gouré de 2mm, et à part une légère non
linéarité induite par cette erreur, ça fonctionne très bien. J'ai corrigé par soft et par flemme
parce que je maîtrise bien les 2.
En ce qui concerne les encodeurs linéaire:
On peut ajouter que ceci n'est pas un encodeur linéaire, c'est juste une astuce
pour connaître la distance en utilisant des encodeurs rotatifs, sans plus.
Pour les vrais encodeurs linéaires, il y a beaucoup de techniques suivant qu'on veut
de l'incrémental ou de l'absolu. Magnétique ou optique. Et en magnétique comme en
optique, il y a plusieurs solutions.
On peut faire du vrai linéaire par bricolage, mais c'est un peu technique.
Par exemple en utilisant un circuit imprimé où on a dessiné une piste en créneaux.
On envoie une sinusoïde de quelques dizaines de kHz (constant) et on récupère le
signal par des micro boucles, en circuit imprimé aussi. La démodulation est un peu
délicate et la technologie un peu dépassée, mais elle a fait ses preuves quand on
n'avait rien de mieux. On peut améliorer le couplage magnétique en collant les
pistes en crénaux sur un support ferreux.
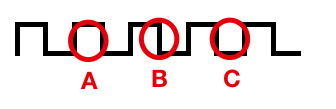
Le schéma suivant explique le principe:
screenshot_983.png
- Dans la piste en créneau, on envoie un signal sinusoidal, par exemple 10 kHz.
- Dans les boucles de réception (mobiles), on reçoit le signal. Mais son amplitude
varie en fonction de la distance. Par exemple en A, on aura une pleine amplitude.
En B, vu qu'il y a autant de surface de part et d'autre, on n'aura quasiment rien.
Et en C, on aura pleine amplitude, mais avec une phase de PI. Pour les positions
intermédiaires, l'amplitude varie de façon approximativement sinusoïdale en fonction
de la distance. En connaissant 2 phases distinctes, on peut calculer l'angle électrique,
donc la distance sur une période, et générer les phases A et B. Voilà pour l'incrémental.
Pour l'absolu, on utilise la méthode Vernier avec 2 pistes de PCB de périodes différentes.
Il y a bien sûr les capteurs optiques, mais dans un environnement à copeaux de bois,
il vaut mieux oublier tout de suite. Ci dessous une photo d'une règle optique.
IMG_2647.jpg
On remarquera une piste pseudo-aléatoire qui est aussi une technique pour avoir un
encodeur absolu. La piste master est au pas de 0.256mm. L'encodeur a une résolution
de 1/4 de micron sans forcer, 15 nanomètres en s'appliquant.
Il y a peut-être une autre solution bricolée très simple, en utilisant des feuilles
magnétiques (un genre de caoutchouc avec des particules magnétiques dedans). Je n'ai
jamais essayé, mais à vue de nez, avec des capteurs à effet Hall, on peut faire un
encodeur linéaire incrémental. Ceci dit, ce genre de matériau est fait pour coller
à un tableau ou à un frigo, mais pas pour de la métrologie (aucune garantie de stabilité
en temps, en température, etc...) Pour couper du bois, je dirais que ça doit marcher.
J'ai déjà mesuré ce genre de matériau par curiosité, le pas est autour de 4mm (donc
exploitable avec les capteurs existants), et la magnétisation est aux alentours de
30 kA/m, ce qui doit être lisible par les capteurs usuels, souvent entre 10 et 100 kA/m.
La question est de savoir si on peut en trouver un morceau de 2,50...
Bon, j'ai fait une belle digression... Mais au pas de course parce qu'il y aurait
matière à en faire un bouquin complet, voire plusieurs tomes.
Pascal
Bonsoir
Vouloir usiner du bois au 1/10 mm sur 2500mm relève de l'utopie car cela dépendra de la température, de l’hygrométrie et de l'age du capitaine la menuiserie se contente du 1/2 mm.
Le bois(de bonne qualité) varie au minimum d'environ 0,05%(sens des fibres) suivant les conditions précédentes donc sur 2500mm cela fait 1,25 mm soit un ordre de grandeur par rapport à ce qui est souhaité.
Ce qui amène à penser que le 1/2 mm peut être tenu par un encodeur 14 bits ce qui devient plus raisonnable, le soucis restera le mécanisme de réduction.
JR
l'électronique c'est pas du vaudou!
Bonjour!
Vouloir usiner du bois au 1/10 mm sur 2500mm relève de l'utopie
D'ailleurs même du métal, ce n'est pas très facile non plus. En proportion, c'est
comme 1/100 sur 250 mm ou 1 micron sur 25mm, ça commence à être de la
mécanique assez précise.
Ceci dit, il faut voir aussi le côté ludique, le fait de pouvoir montrer le tout
à ses (petits) enfants en disant je l'ai fait. Ou un défi personnel. C'est peut-être
aussi un peu le but.
En ce qui concerne les encodeurs, avec un chip 10 bits et un aimant de qualité
raisonnable on a une précision d'environ 3 lsb sur 1024.
Un 14 bits, c'est bien, mais il faut de toute façon la démultiplication si on veut
la position absolue. Et les pignons, la mécanique, je ne serais pas étonné que ce soit
le plus cher de ce projet. Le moins cher est 10 bit directement sur l'axe, avec un
interrupteur pour faire le 0. Dans la mesure où le 0 reste tant qu'on est sous tension,
c'est peut-être jouable de faire le 0 une fois à la mise en route. Et puis un 14 bits
tout fait, c'est assez cher, trop pour une application comme celle-là. Enfin, si vous
en connaissez, publiez les lien, ça m'intéresse pour référence.
Ceci dit, ce qui est important en menuiserie n'est pas tant la précision
que le fait de pouvoir couper 2 planches exactement à la même longueur. Par exactement,
je veux dire suffisamment proche pour que ça ne se voie pas à l'assemblage.
En ce qui me concerne, je mettrais une règle graduée vissée sur le chant de la table
(par exemple en sacrifiant un mètre roulant qu'on colle) avec un index qui pointe sur le
0 quand le guide touche la lame. Mais bon ce n'est plus du ressort de ce forum.
Pascal
Ah j'ai noté une erreur dans le calcul dans mon dernier message ci-dessus:
100 * [18 + (325/1024)] soit 183.17mm.
Ce n'est pas 183.17mm, mais 1831.7mm.
Encore un post qui motive plos les participants que linitiateur.
Le fait de cogiter sur un projet à la limite du faisable et toujours motivant LOL.
Effectivement,
Le bois est vraiment élastique et varie beaucoup avec les conditions environnantes.
Une planche de chez brico machin plie sous son propre poids de plusieurs centimètres, parfois à la limite de la rupture.
Le bois humide à été utilisé pour fendre le granite, c est dire sa capacité à gonfler avec force...
Tailler un poteau télégraphique au 1/10, semble vraiment être utopique...
Quand aux 14 bits
2500mm x 10 = 25000
et 14 bits c est 16384 pas
trop court !
ou alors 2/10 mm
Et une précision pareille sur un potentiomètre standard , c'est encore une utopie.
Même bobiner avec autant de spires, je ne sais pas si ça existe ?
(En plus, généralement Arduino, c est 10 bits, le titre du post)
Un rail de chemin de fer se dilate de plusieurs mm en longueur selon la température.
Là encore, une mission infernale.
On entre dans la haute technologie.
D'ailleurs même avec un comptage, quelle serait l'erreur au bout de 25 000 pas?
En admettant une erreur de 1/100 on a tout de même 250mm, c'est énorme !
La mesure au télémètre a ultra sons sera surement plus sure !
Et même de simple switches serait mieux..
Juste une anecdote d'électronicien;
Le fait de faire une photocopie (21:29,7 cm) de PCB sur un transparent lequel était chauffé par la machine afin de fixé le toner.
Cela élargie la feuille de quelques millimètres , un PCB assez large avait des trous de CI inexploitable a cause de ce défaut.
Bonne cogitation à tous !
Bonjour!
Pas grave, ça a l'avantage de faire réfléchir, estimer si c'est faisable. C'est toujoursEncore un post qui motive plos les participants que linitiateur.
un bon exercice. Et puis, c'est connu, 10 ingénieurs sur un même problème, ça donne au
moins 20 solutions, comme on peut le constater presque à chaque fois. Ça ne peut qu'enrichir
le débat.
Oui, ça a été dit. 0.15mm. Ceci est la résolution. Comme il était question de précisionQuand aux 14 bits
2500mm x 10 = 25000
et 14 bits c est 16384 pas
trop court !
ou alors 2/10 mm
au départ, je ne pense pas que ce soit faisable et je ne suis pas le seul. Mais on peut
penser que l'initiateur, menuisier hobbyiste s'est un peu mépris sur les termes, et il
n'est pas déplacé de lui proposer des solutions (au cas où il lise encore). En plus,
il parlait d'approcher le 1/10, ce n'était pas une condition stricte.
Même si on s'en tient au titre, on est bien obligé de mettre des composants externes,(En plus, généralement Arduino, c est 10 bits, le titre du post)
parce que Arduino seul n'ira pas loin.
Quelqu'un proposait un encodeur 14 bits en bout d'arbre, c'est une bonne solution, sauf
peut-être le prix, je ne sais pas, il y en a peut-être des pas trop chers. Mais on arrive
assez proche de ce qu'il faut faire (1), la mesure précise étant faite par l'encodeur, pas
par Arduino qui, lui, peut se contenter de lire l'encodeur et gérer l'affichage.
(1) Si on ne chipote pas trop sur la confusion possible résolution / précision.
Oui, ça a aussi été dit dès le début par Antoane (je crois), peut-être même avant.Et une précision pareille sur un potentiomètre standard , c'est encore une utopie.
Les erreurs ne seront jamais toutes dans le même sens. Même s'il y a un jitter surD'ailleurs même avec un comptage, quelle serait l'erreur au bout de 25 000 pas?
En admettant une erreur de 1/100 on a tout de même 250mm, c'est énorme !
chaque pas, ils vont s'entre compenser. Pour la résolution, 0.15 (voir plus haut) et
pour la précsion peut-être 0.5 ~ 1mm en prenant en comte un encodeur de 14 bits.
Je ne sais pas de quel 14 bits il était question. Par contre la combinaison que je
proposais forme un encodeur absolu sur 2m50. Il n'est donc pas question de compter
mais simplement de lire les 2 encodeurs (ou l'encodeur dans le cas d'un 14 bits) et
calculer la distance.
C'est une excellente idée. Maintenant, si vous pouviez développer un peu et expliquerEt même de simple switches serait mieux..
comment vous mesurez 0 ~ 2m50 à 0.1 (ou 0.2) mm de précision (ou même de résolution), avec de
simples switches (et sans encodeur, cela va de soi), tout le monde y gagnerait probablement
un savoir précieux.
Pascal
Bonjour,
il faut tout lire : 2500mm avec une précision du 1/2 mm cela fait 5000 donc un peu plus que 12bits comme 13 bits ce n'est pas courant il faut donc 14 bits qui peuvent être répartis entre par exemple 6 bits pour encoder un tour (vis au pas de 30) et 8 bits pour compter les tours; si l'entrainement est a vis tout ceci dépendra donc du pas de la vis, on trouve de tout de 2 à 30/40 mm par tour par contre en 2,5m çà c'est plus difficile mais cela existe. Donc une précision sur le mode d'entrainement serait un plus
JR
l'électronique c'est pas du vaudou!
Je ne sais pas si c'était une idée vraiment bien ...comment vous mesurez 0 ~ 2m50 à 0.1 (ou 0.2) mm de précision (ou même de résolution), avec de
simples switches (et sans encodeur
J'ai constaté que sur mon imprimante 3D le switch de position basse , alors que la précision des couches est de 0.2mm semble vraiment précis.
Combien ? Aucune idée ... Mais assurément bien 0.1mm semble être sur.
Donc si on positionne des switches sur la longueur à des positions parfaitement réglées , en divisant la longueur par n, on a le poids fort de la mesure.
|===|===|===|===|
On divise par n +1 (sans compter les butée de fin de course)
Avec un switch On divise par 2
Avec 2 on divise par 3
etc..
L'écart entre 2 swiches est un tour complet de l'unité basse.
ça annule l'erreur quand on passe sur le switch on connait la position exacte.
ça pourrait même permettre de calculer l'erreur par soft et compenser ... (ça y est l usine à gaz soft ! LOL)
Bon..., ça parait difficile à régler tout ça.
Juste une idée en l'air comme ça ...
Mais ce n'est que du fil et des contacts.
Et du soft.
Bonjour,
Quelle est la référence de ces chips? Où peut-on les trouver?
Un civet, un plat de côtes et puis, glissez-moi une petite paupiette avec.( Lino Ventura)
Merci pour tous ces renseignement très instructifs
Pour rassurer certain, l'initiateur lit toujours et est très intéressé par toutes ces réponses.
Effectivement 1/10 sur 2500 millimètres n'est pas le but, le but est de réaliser soit meme quelque chose en étant le plus proche des machines professionnel.
Tous les grands fabricants de machine à bois fabrique des machines à positionement numerique précise au dixième de millimètres sur des plus grande longueur (voir striebig fabriquant suisse, UTIS fabriquant Francais, altendorf fabriquant Allemand ou SCM fabriquant Italien). Bien évidement avec une autre technologie que arduino.
Un vrais atelier bois est chauffer et l'hygrométrie du bois y est contrôlé en permenance, mais malgré ça bien sûr qu'il travail et que les dixième bougent vite. Il suffit de poncer un peux et très vite on peux perdre quelque dixième. Les plans d'usinage de menuiserie on dès tolérance qui tourne souvent autour de plus ou moins 2 dixième de millimètres.
Pour info si on veux bricoler un peux sérieusement, on achète pas la merde de brico machin ou autre, vu comme c'est déjà Stoké on ne peux rien en faire. Il vaux mieux aller voir des négoces professionnel.
J'ai lancé cette réflexion car je suis très étonné de ne pas trouvé facilement ce type de butée bricolée sur le net.
Il y a tellement de super chose créer avec arduino mais qui n'on pas forcément une utilité dans la vie.
Au jour d'aujourd'hui on n'est plus très proche de la réalité du terrain. On préfère vivre dans un monde virtuel ou on s'étonne que les gens ne réponde pas à un mail, un forum ou une notification à la vitesse de l'éclair parce que beaucoup de gens vivent leurs vie au travers d'un écran.
Je suis simplement à la recherche d'une solution car j'aime créer des choses developer réfléchir par passion et pas pour réinventer le monde.
Par exemple j'ai construit moi meme ma maison (en bois et on ne rigole pas). J'ai fait beaucoup de recherche sur le net et j'y suis très bien arrivé. Quand je pense qu'aujourd'hui des gens chauffent encore leurs maison, moi j'ai tous simplement fabriquer une maison passive et ca fait 5 ans que j'habite dedans avec une facture de 0,0 de chauffage.( j'habite dans l'est de la france dans les vosges ou les hivers sont rude)
J'espère avoir été clair dans mes explications et mon raisonnement. Peut être que j'arriverais à faire une buttée avec plus ou moins de précision, ou peut être je n'irais pas au bout de ce projet.
Au vue des réflexions que ma demande à suscité je pense qu'avec votre aide, j'arriverais à la créer.
Merci
Bonsoir,
Pour info je suis en ce moment dans la construction d'une CNC, une petite 170mmx140mm de course et je ne suis pas sur de tenir le 1/10eme et pourtant c'est du lourd coté guidage. un contacteur de fin de course c'est environ 0,3mm de précision, c'est suffisant pour éviter la casse mais pas pour usiner de façon précise il faut ou disposer d'un capteur plus précis ou bien zéroter à la main.
JR
l'électronique c'est pas du vaudou!
Bravo, belle machine
Bonjour!
Oui, c'est une solution, mais il était question de ne pas utiliser de vis parce que c'estil faut tout lire : 2500mm avec une précision du 1/2 mm cela fait 5000 donc un peu plus
que 12bits comme 13 bits ce n'est pas courant il faut donc 14 bits qui peuvent être
répartis entre par exemple 6 bits pour encoder un tour (vis au pas de 30) et 8 bits
pour compter les tours;
lent à déplacer. Je pense qu'il veut déplacer son guide à la main...
Et puis une vis de 2,50m de long, ça va commencer à chiffer aussi.
Oops, le fait est que je n'en ai même pas parlé. Il s'agit d'un TW11 fait par iC-Haus.Quelle est la référence de ces chips? Où peut-on les trouver?
C'est d'ailleurs assez curieux que personne n'ait posé la question, mais bon...
Pour l'acheter, par exemple là.
Pour l'aimant, on peut en trouver chez Digikey.
La réalisation a en effet l'air solide. Le portique mobile a un inconvénient en rigidité,un contacteur de fin de course c'est environ 0,3mm de précision, c'est suffisant pour
éviter la casse mais pas pour usiner de façon précise
mais par contre la table mobile tiendrait plus de place...
Je ne vois pas exactement si vous utilisez des encodeurs, c'est peut-être tout simplement
des moteurs pas à pas en boucle ouverte. Dans le cas où vous avez aussi des encodeurs,
il est possible de rendre le contacteur fin de course très précis. Tous les encodeurs
qui ont un signal Z le font. Vous définissez l'angle du signal z pour l'encodeur, et
vous utilisez votre contacteur de fin de course comme unn Z enable. Donc si le contacteur
est activé ET si l'angle est xxx, alors on est à 0. Par exemple avec un encodeur 10 bits,
vous pouvez décider que le 0 sera à 327. Si le contacteur s'active, pas d'action, et
si pendant qu'il est activé vous passez à 327, alors c'est le 0.
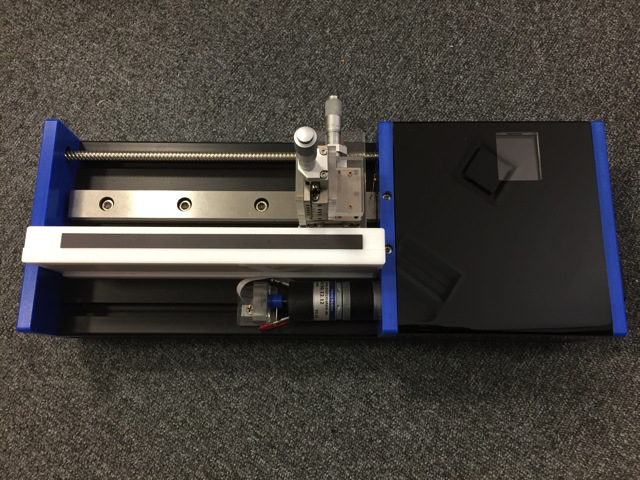
Je suis en train d'automatiser un tour. J'ai acheté des vis à billes (donc sans jeu) en Chine.
La précision n'est pas terrible, mais elles n'ont pas du tout de jeu. Je vais mesurer la distance
avec une règle magnétique. Pas = 2.56mm. 14 bits, donc 0.156µ. Bien au delà des capacités du
tour, mais comme on dit, qui peut le plus peut le moins. La précision du tour sera dépendante
de la précision de la règle, pas de la vis.
Photo de gauche, matériel. Photo de droite, règle magnétique à 3 pistes (master / vernier / segment,
encodeur absolu sur 650 mm). Pas très facile de prendre la photo en tenant le "révélateur" magnétique.
IMG_2653.jpg IMG_2655.jpg
Ah, les Vosges! Belfahy et son restau dont j'ai oublié le nom, qui fait des tartesj'habite dans l'est de la france dans les vosges
aux brimbelles... Toute une époque. D'ailleurs le restau n'existe peut-être plus.
Pascal
Qu'est-ce qui chauffe la maison?
Un civet, un plat de côtes et puis, glissez-moi une petite paupiette avec.( Lino Ventura)
Bonjour Murayama.
Je regarde un peu les prix des règles magnétiques.
On n'est pas du tout dans les prix des codeurs magnétiques rotatifs TW-11.
Tu avais donc bien raison d'écrire en #11,
Mais au message #15, tu écris:
ça met l'eau à la bouche! Peux-tu nous en dire plus long?
On peut trouver ce type de matériau dans les auto-shops, pour des signes à placer temporairement sur des carrosseries de voiture.
Qu'entends-tu par "pas de 4 mm"?
Est-ce que l'on pourrait envisager un système basé sur:
d'une part, de la bande magnétique de cassette vidéo que l'on collerait sur le tour, parallèlement au chemin de déplacement linéaire.
D'autre part, assemblage contenant plusieurs têtes de lecture de cassette audio (si ça se trouve encore!)placées côte à côte sur la largeur de la bande vidéo.
Dans un premier temps, les têtes de cassette audio magnétisent la bande avec des signaux en quadrature.
Par la suite, on utilise des capteurs Hall pour lire ces signaux.
...Juste une idée...
Un civet, un plat de côtes et puis, glissez-moi une petite paupiette avec.( Lino Ventura)
Bonjour!
Oui, les règles magnétiques conçues pour la métrologie sont assez coûteuses.
Je ne pense pas toutefois que celles que j'ai coûtent une fortune. Tout au plus
quelques dizaines d'Euros.
MAIS: elles ont une longueur de 700 mm. Enfin 256 * 2.56mm de pas, exactement,
soit 655.36 mm utilisables. Et plus on veut faire des règles absolues longues,
plus la magnétisation est délicate. Bon je n'explique pas pourquoi, ça prendrait
des heures. Et dans ce cas là, on aurait des composants assez chers. Par exemple
une à 1024 période (donc, 2m62), je crois que ce serait vraiment cher, peut-être
dans les 1000 Euros. Je me renseignerai, à titre indicatif, pour les différents
types. Bref, les règles dont je parle, ce ne sont que des morceaux de matériau
magnétique. Après, il faut construire l'encodeur qui va dessus.
La règle Mitsutoyo, au cas où vous l'achetez, attention: c'est pas trop cher parce que c'est
d'occasion et que ce n'est que la règle, on dirait.
J'en joins une photo vue de plus près. Le principe, c'est à peu de chose près ce que
j'expliquais, avec les boucles de lecture à fréquence constante. Alors si le capteur n'est
pas livré avec, il va falloir se colleter à la démodulation qui n'est pas tout-à-fait triviale.
IMG_2658.jpg
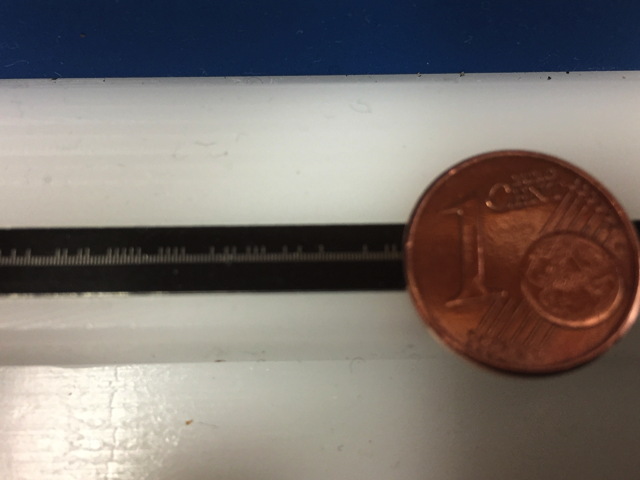
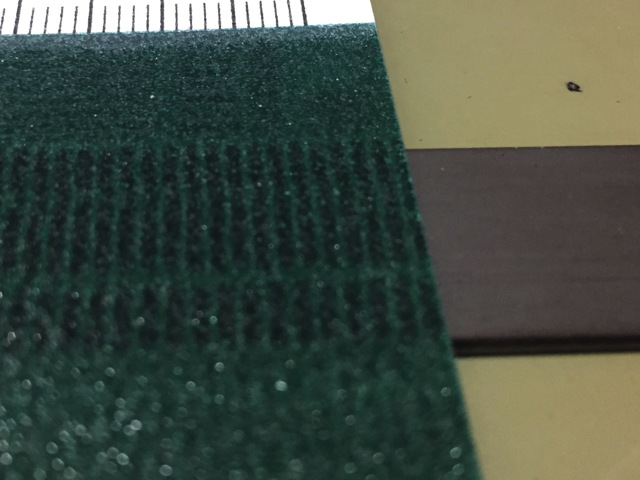
Oui, c'est exactement ce matériau. En fait, la magnétisation est une suite deça met l'eau à la bouche! Peux-tu nous en dire plus long?
On peut trouver ce type de matériau dans les auto-shops, pour des signes à placer
temporairement sur des carrosseries de voiture. Qu'entends-tu par "pas de 4 mm"?
lignes NSNSNS, et la période (ou le pas), c'est justement la largeur en mm d'une
paire NS. Je viens d'en retrouver un dans la poubelle, voir photos. C'est une pub que
les plombiers distribuent ici pour qu'on les colle sur le frigo pour avoir toujours leur
numéro sous la main.
IMG_2656.jpgIMG_2657.jpg
Bon, je m'aperçois que le pas est en fait de 6mm (2 raies). Mais avec des capteurs
à effet Hall placés correctement, on doit pouvoir y arriver.
En fait, le tout est d'arriver à générer 2 signaux en quadrature. Une fois que c'est
fait, on peut dire qu'il y a du boulot d'abattu.
Ensuite, il faut calibrer les signaux pour qu'ils aient la même amplitude, ce qui
se fait avec des amplis op, puis corriger la phase si elle n'est pas exactement
à pi/2 (amplis op aussi), et corriger l'offset (toujours ampli op, on ne change
pas une équipe qui gagne). Ensuite, conversion AD, et calcul de l'angle électrique.
Les sinusoïdes auront une période correspondant au pas. L'angle électrique, c'est
Atg(sin / cos). À partir de là, on sait quelle proportion de période magnétique
on a parcouru, on peut donc en déduire la position du capteur.
Non, malheureusement, ça ne peut pas fonctionner, parce que la sortie d'une têteEst-ce que l'on pourrait envisager un système basé sur:
d'une part, de la bande magnétique de cassette vidéo que l'on collerait sur le tour,
parallèlement au chemin de déplacement linéaire. D'autre part, assemblage contenant
plusieurs têtes de lecture de cassette audio (si ça se trouve encore!)placées côte à
côte sur la largeur de la bande vidéo.
magnétique est nulle à vitesse nulle.
Ça pourrait fonctionner (un peu) si on peut s'assurer que la vitesse est constante,
un peu comme sur les vieux analyseurs de spectre à rouleau. Mais le but d'un encodeur
linéaire est d'être précis même à vitesse nulle. Ou alors il faudrait développer des
capteurs à effet Hall spéciaux, mais je ne suis pas certain que ce soit faisable.
D'ailleurs si aucun fabricant ne l'a fait...
Donc on doit avoir un matériau magnétique avec une certaine force de champ, à vue de
nez quelque dizaines de kA/m. Les bandes magnétiques seraient bien trop faibles pour
émouvoir les capteurs à effet Hall. NB: Je dis "force de champ" parce que je ne sais
pas comment ça s'appelle en Français. Je trouve "force du champ magnétique" sur google,
mais ça me paraît chelou parce que ce n'est pas une force. Disons 磁場の強さ et n'en
parlons plus. C'est le H, pas le B qui est utilié dans ce petit monde assez fermé.
Voilà.
Je pense faire une petite série de capteurs précâblés avec TW11. Je ne suis pas tellement
fan d'Arduino, donc je pense faire des cartes qui s'adaptent sur les launchpads de TI.
Par exemple le launchpad 5529. Mais bon, c'est du travail d'après 17 heures ou de dimanche
pluvieux, je ne peux pas promettre de délai.
Pascal
Bonjour,
Il me revient en mémoire un système utilisé pour certaines tables traçantes (HP je crois) une mesure par ultrasons , l'onde sonore étant véhiculée par un rail métallique, donc variation de vitesse faible avec la température. Encodage absolu évident mais sans doute assez difficile à réaliser.
JR
l'électronique c'est pas du vaudou!



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}