Bonjour,
Je suis un étudiant en classe prépa scientifique (PSI).
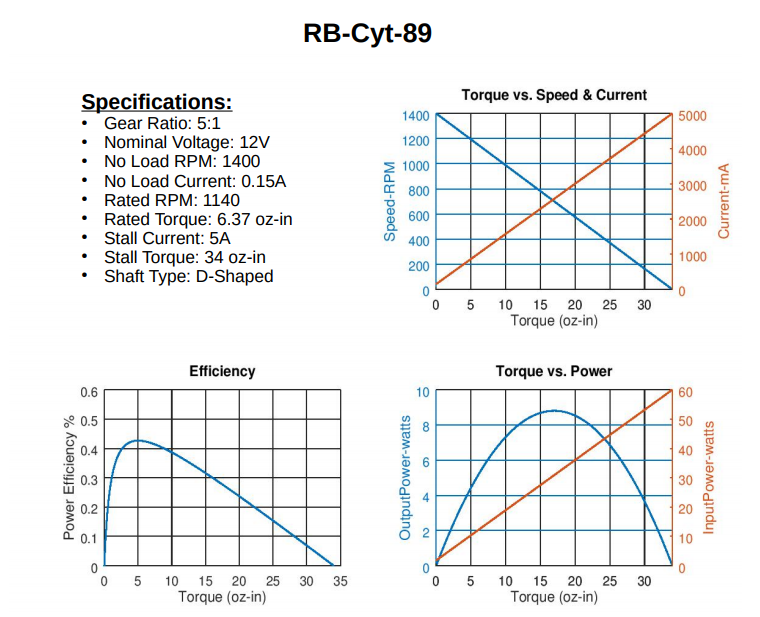
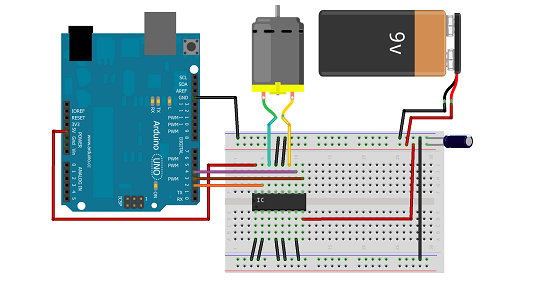
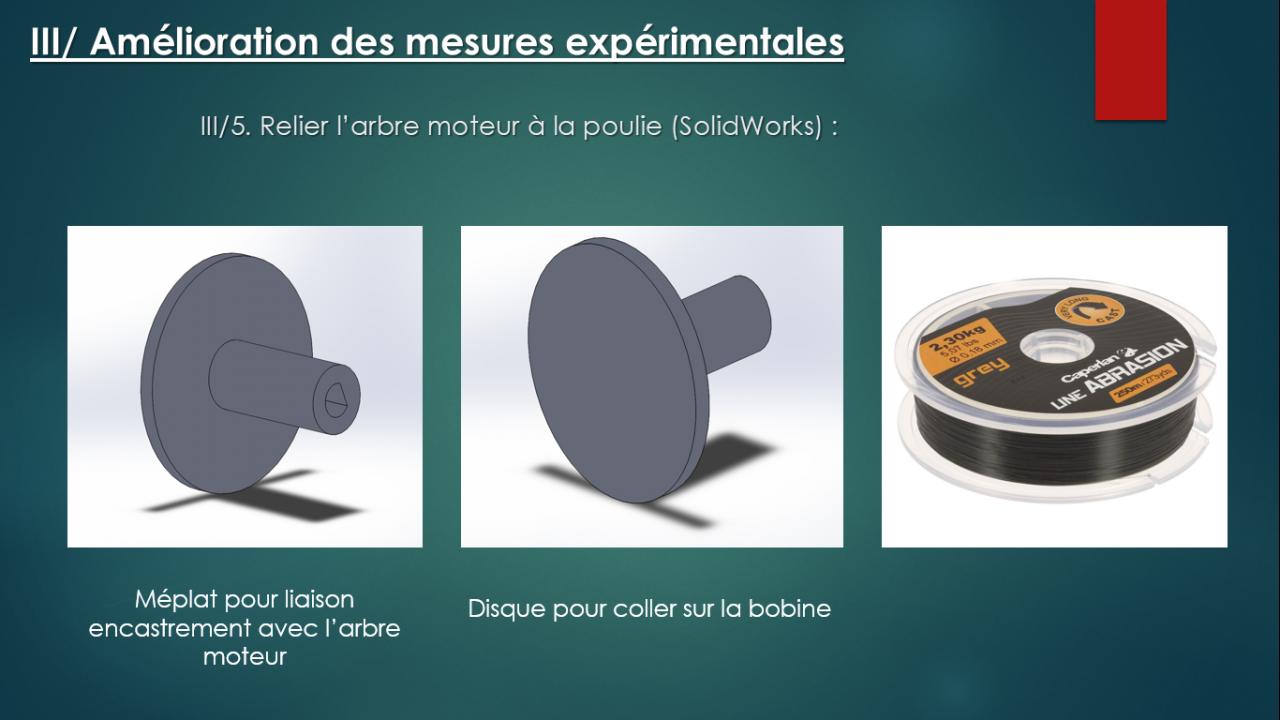
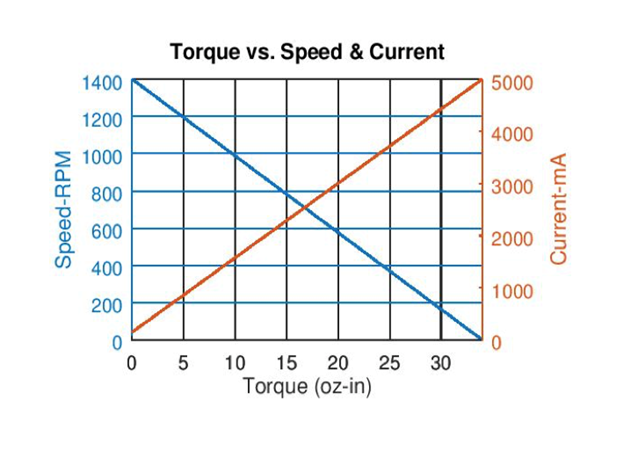
Je cherche à construire un treuil asservi permettant de tirer à vitesse constante un bateau pour mon TIPE. Je compte pour cela utiliser une carte Arduino que je me suis procuré en achetant ce kit : https://www.amazon.fr/Quimat-Profess...ds=kit+arduino. L'idée est de fixer l'arbre moteur d'un moteur électrique à une bobine de fil (liaison encastrement). Le fil sera relié au bateau et je pourrai ainsi tirer le bateau grâce à ce montage. Après une étude pour le dimensionnement du moteur, j'ai calculé qu'il me fallait un couple max de 6,3.10^(-2)N.m et une vitesse de rotation variant de 50 à 1000tr/min. J'ai trouvé ce moteur qui répond aux exigences : https://www.robotshop.com/eu/fr/mote...ur-cytron.html. Il possède de plus l'avantage d'avoir un codeur intégré permettant de renvoyer sa vitesse de rotation, ce qui facilitera l'asservissement. Cependant, il consomme 4-5A ce qui est gênant pour l'alimenter avec un driver L298D car il ne peut fournir qu'1A au moteur. J'ai donc trouvé ce composant qui pourrait, si j'ai bien compris, remplacer le L298D et alimenter le moteur avec 5A : http://fr.farnell.com/infineon/tle52...rTechnicalDOCS. Ce composant conviendrait-il et est ce que les câbles Arduino et la Breadbord pourront encaisser les 5A qui circuleront ?
Que pensez vous du moteur trouvé ? Existe-t-il des moteurs qui auraient les mêmes caractéristiques (couple et vitesse de rotation) mais qui consommeraient moins de courant permettant alors d'utiliser le composant L298D ?
Je vous remercie de vos réponses et suggestions.
-----