

Bonjour,
afin de me préparer pour un contrôle de système automatique je suis en train de réaliser le contrôle fait l'année dernière.*Je souhaiterais que quelqu'un puisse m'aider à corriger mes erreurs s'il vous plaît. Vu que ceci est le 3e exercice et donc complètement différents du premier je me suis permis de séparer le contrôle en plusieurs posts. Si cela est interdit je prie les modérateurs de bien vouloir m'excuser s'il vous plaît.
Exercice 3:
On considère le système suivant à commander :*G(p)= 40 / [p^3+7*p^2+14p+8]
Dans un premier temps, on propose un asservissement par Correction Proportionnelle : D(p) = K. Lasservissement est à retour unitaire. Ici k=1.
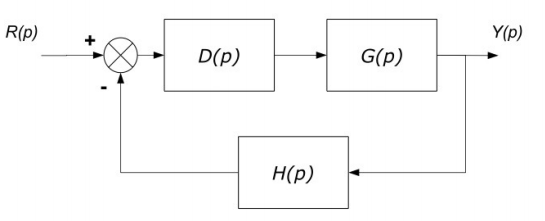
1. Dessiner lasservissement en indiquant les signaux de consigne, de commande et de sortie.
2.*Donner lexpression de la fonction de transfert T(p) en boucle ouverte.
3.*Calculer lexpression de lerreur de position; lexprimer en fonction de K.
Etude pour K = K1 = 1
La fonction de transfert en boucle fermée pour K = K1 = 1 est notée F1(p).
4.*Pour quelle raison lasservissement est-il stable? Pour quelle raison le comportement de la réponse est-il périodique ?
Asservissement par correction Proportionnelle-Intégrale*
On considère ici le correcteur : D(p)=Ki * ([1+Ti*p] /*Ti*p) . On impose Ki = 1.
5.*Quelle(s) différence(s) est(sont) attendue(s) avec ce correcteur comparativement au correcteur proportionnel de gain? Justifier.
6.*Comment peut être obtenue la meilleure valeur de Ti possible ? Expliquer la démarche et proposer une valeur pour Ti.
Asservissement par Correction Proportionnelle-Intégrale-Dérivée
Le correcteur utilisé ici est de la forme : D(p)=Ki * [1+Td p]* ([1+Ti*p] /*Ti*p)*avec Ki = 1 et la valeur de Ti calculée précédemment.
Lobjectif visé est daméliorer, par rapport au correcteur précédent, la marge de phase de 20°
7. Faire la synthèse de ce correcteur (calcul de Td et ajustement éventuel du gain).
1.
2. T(p) =*40*k / [p^3+7*p^2+14p+8]
3. Quand p tends vers 0:
Lim Ep(p) = Lim p(1-F(p))*R(p) = Lim p(1-T(p))*(Ro/p) = Lim ([p^3+7*p^2+14p+8-40] /*[p^3+7*p^2+14p+8])*Ro = -4Ro
4. Ici je n'ai pas la moindre idée de la manière d'y répondre.
5. Selon le cours la dynamique et la précision devrait augmenter et l'erreur diminuer. Cependant quand je calcule l'erreur de position et de vitesse je me retrouve à -oo.
Quand p tends vers 0:
Lim Ep(p) = Lim p(1-F(p))*R(p) = Lim p(1-T(p))*(Ro/p)
= Lim ([Ti*p*(p^3+7*p^2+14p+8)-40-40*Ti*p] /*[Ti*p*(p^3+7*p^2+14p+8)])*Ro =-00*
Lim Ev(p) = Lim p(1-F(p))*(Rv/p^2)
=*= Lim ([Ti*p*(p^3+7*p^2+14p+8)-40-40*Ti*p] /*[Ti*p*(p^3+7*p^2+14p+8)])*(Rv/p)*=-00
6. Ici aussi je ne sais pas comment m'y prendre.
7. Idem.
Je remercie d'avance ceux qui prendront le temps de bien vouloir m'aider.*
Bonne fin de journée.
Cordialement.
-----