

Bonjour j'ai réalisé un montage électrique avec arduino et raspberry pi ,
Je commande deux servomoteur :
Alimentation: 4,8 à 6 Vcc
Course: 2 x 90°
Couple: 5,5 kg.cm à 4,8 Vcc
Vitesse: 0,20 s/60° à 4,8 Vcc
Connecteur: 3 broches femelles 2,54 mm
Longueur du cordon 3 broches: 300 mm
Dimensions: 41 x 20 x 40 mm
Poids: 38 g
un moteur pas à pas nema 23
NEMA 23
Diamètre de l'arbre de sortie: 1/4"
Couple: 175 oz-in, 12.6kg-cm
Angle du pas: 1.8°
Courant de pointe: 2.8A/phase
Fils de 12" de longueur (Bi-polaire, 4 fils)
et son contrôleur :
Tension d'alimentation: 9 à 42 Vcc
Consommation maxi: 5 A (en fonction du moteur)
Réglage courant: 0,5 A - 1 A - 1,5 A - 2 A - 2,5 A - 2,8 A - 3 A et 3,5 A
Puissance: 160 W
Réglage pas: 1, 2/A - 2/B - 4 - 8 - 16 - 32
Température: -10 à 45°C
Poids: 0,2 kg
Dimensions: 96 x 71 x 37 mm
Référence DFRobot: DRI0043
J'ai également 5 leds :
Diamètre: 5mm
Couleur: Blanc Froid
Tension: 3.0v (Forward Voltage) à 20mA
Luminescente: minimum 15.000 mcd !!!
Angle de vue: cône de 25 degrés
Courant: 20 mA
J'alimente tous mon montage avec une alimentation de pc :
https://www.centralpoint.be/fr/unite...E&gclsrc=aw.ds
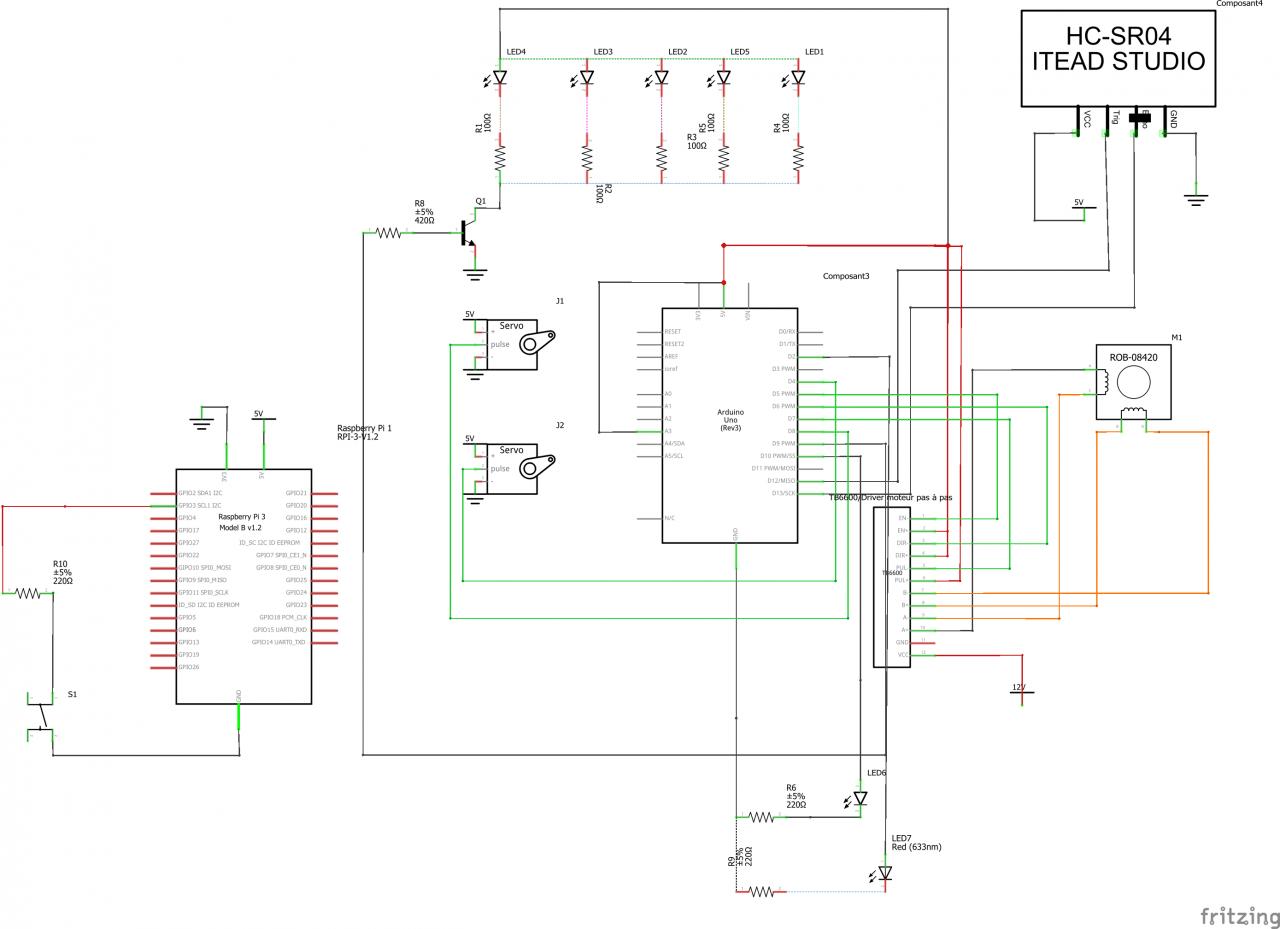
Vous pouvez retrouver mon câblage en pièce jointe :
Quand prouvez me mon cablage est pk d'un point de vue de la sécurité ?
Quelles sont les points auquel je dois faire attention ?
Merci bien
Bonne journée
-----
