

Bonjour à tous,
je souhaite réaliser un appareil de contrôle afin de mesurer l'angle exact qu'il y a entre les 3 capteurs d'un moteur Brushless à capteurs.
Sur ces moteurs ce trouve 3 capteurs à effet hall, (A B C) , le rotor est soit un 2 pôles, soit un 4 pôles .
l'idée de cet appareil serait de mesurer exactement l'angle qui se situe entre chaque capteurs afin de l'affiner au maximum pour gagner en précision, donc en vitesse et en rendement.
Actuellement j'ai déjà réalisé :
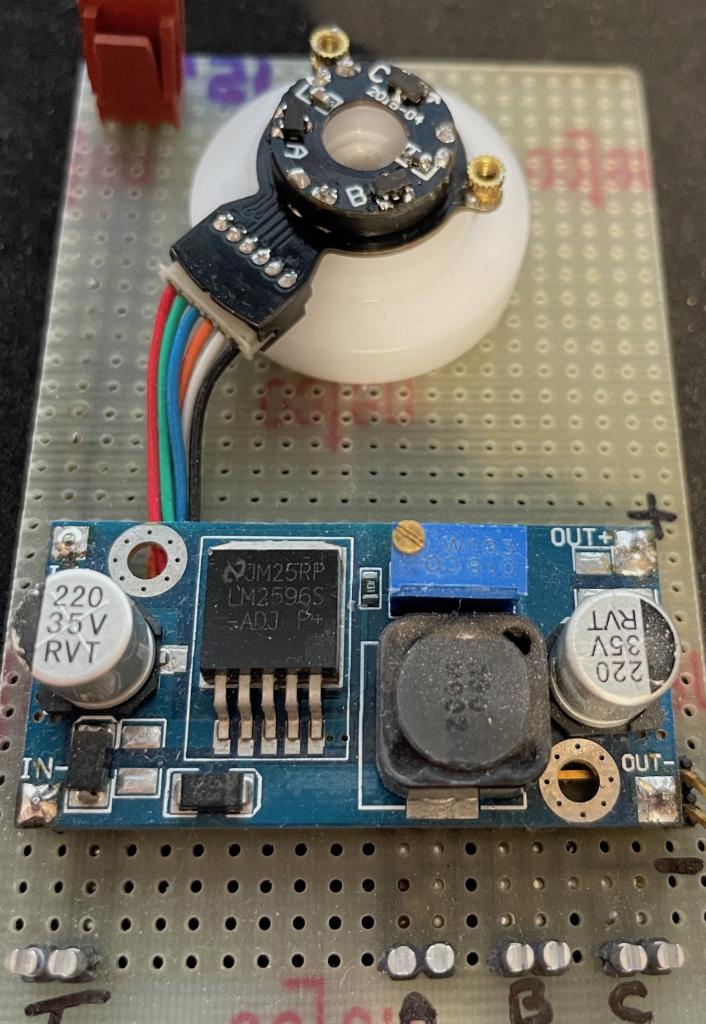
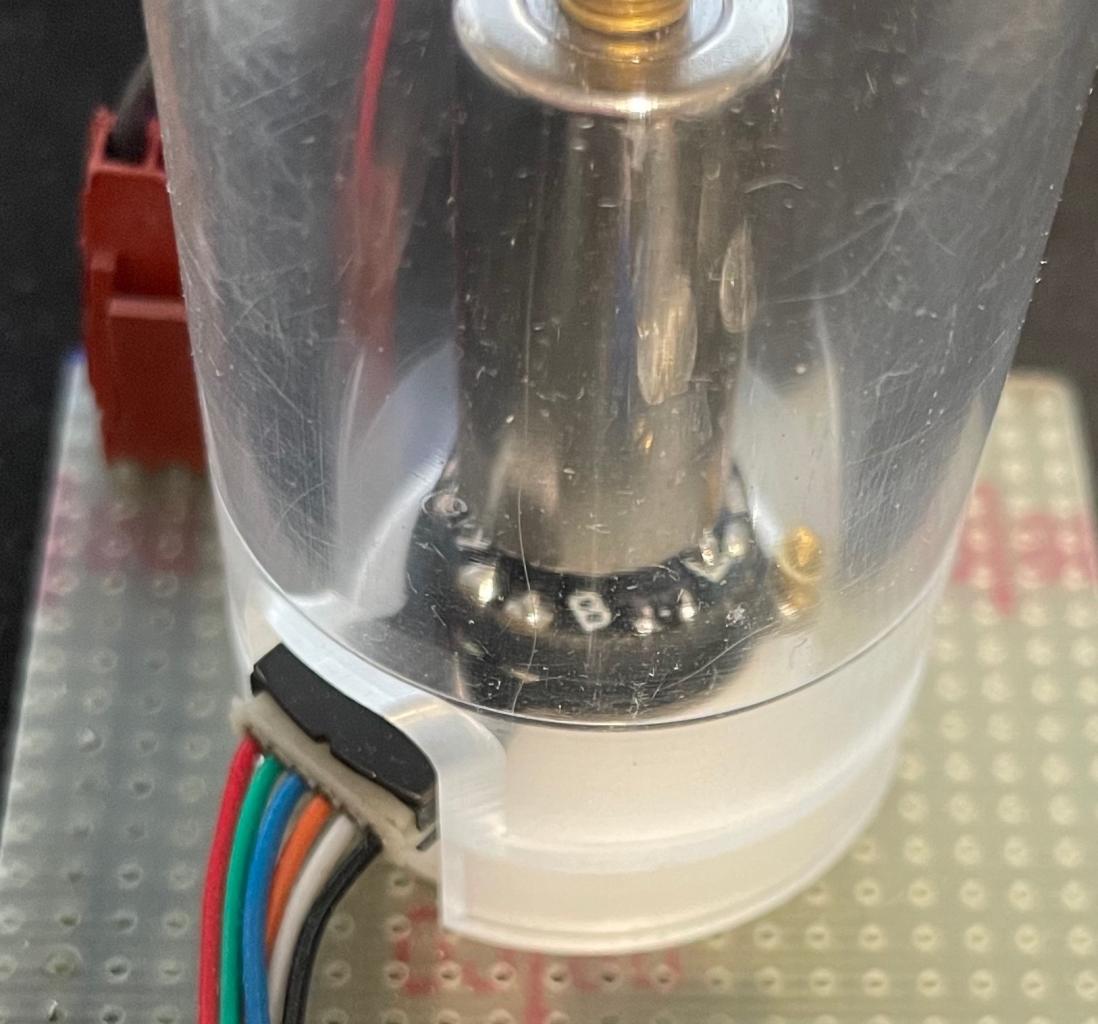
- Un support pour recevoir la carte à contrôler
- Un aimant calibré avec une asymétrie proche de 0° sur un support facile à enlever et à remettre.
- Une alimentation de la carte capteur
- Une reprise des signaux de sorties sur des bornes grip fils.
Tout ceci est parfaitement fonctionnel et je peux déjà voir de beaux signaux avec loscilloscope .
donc jusque là j'ai tout (mécaniquement)
C'est là que j'ai besoin de vos compétences afin de mener à bien ce projet .
J'aimerai maintenant pouvoir mesurer rapidement sur un petit écran LCD 2x16 l'angle exact à .x décimal entre les 3 capteurs via un Arduino Uno.(ou similaire)
donc je pense qu'il faut mettre un petit moteur afin d'entrainer l'aimant à une vitesse donnée (j'imagine 1000T/min dans un premier temps).
et ensuite pouvoir afficher l'angle des trois capteurs .
Exemple :
Lancement du moteur d'entrainement (je pense un petit moteur pas à pas).
vérification de la vitesse (1000T/min ) ajustement avec un potentiomètre .
clique et affiche la mesure en Temps réel.
ligne 1 : --A°---B°---C°--
ligne 2 : -30.0-31.0-30.5-
pour le moment se serait déjà super si j'arrivais à avoir un petit montage fonctionnel, et pourquoi pas le faire évoluer par la suite .
si vous avez des idées je suis preneur.
en vous remerciant pour votre aide.
Yoann
-----




{kind=link}
{kind=link}