C'est prévu pour être sur un circuit imprimé ou en l'air ?
-----

C'est prévu pour être sur un circuit imprimé ou en l'air ?
C'est prévu pour être sur un circuit imprimé ou cablé en l'air ?Envoyé par harmoniciste

Tu aurais dû en prendre plus pour remplacer aussi la diode
Sinon, classiquement, capteur à effet Hall pour mesurer le courant, ou sinon un tas de résistances en parallèle
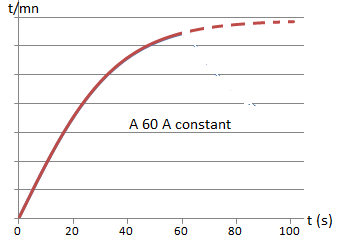
Je n'envisage pas de régulation (boucle de retour), mais plus "simplement" d'appliquer un rapport cyclique forfaitairement évolutif en fonction du temps, puisque je connais la loi d'évolution du régime à courant (i.e couple) constant.
En revanche, une perte à ne pas omettre dans un hacheur est celle de la diode Schottky de "roue libre"
Et concernant le remplacement de la diode de roue libre par un Mosfet, celui-là sera nécessairement canal P, non?
J'ai oublié de répondre au sujet du câblage: Circuit imprimé pour toute la partie génération du signal pulsé. Pour le reste ce sera du conducteur extra souple silicone 6mm2 sur 4 cm de longueur et le cuivre rigide épaisseur 2 mm et 36 cm2 du collecteur thermique pour amener le courant aux bornes de sortie en M6 en cuivre.
Avec une puce driver synchrone tu mets 2 MOSFET canal N et elle active celui du haut ou celui du bas selon l'état de la commande. Celle que j'ai mis en lien plus haut fait aussi émulation de diode poue le MOSFET du bas. La restriction est qu'il n'est pas possible d'avoir un rapport cyclique de 100%, seulement 99.999 etc %.
Merci pour ta patience, Bobflux.
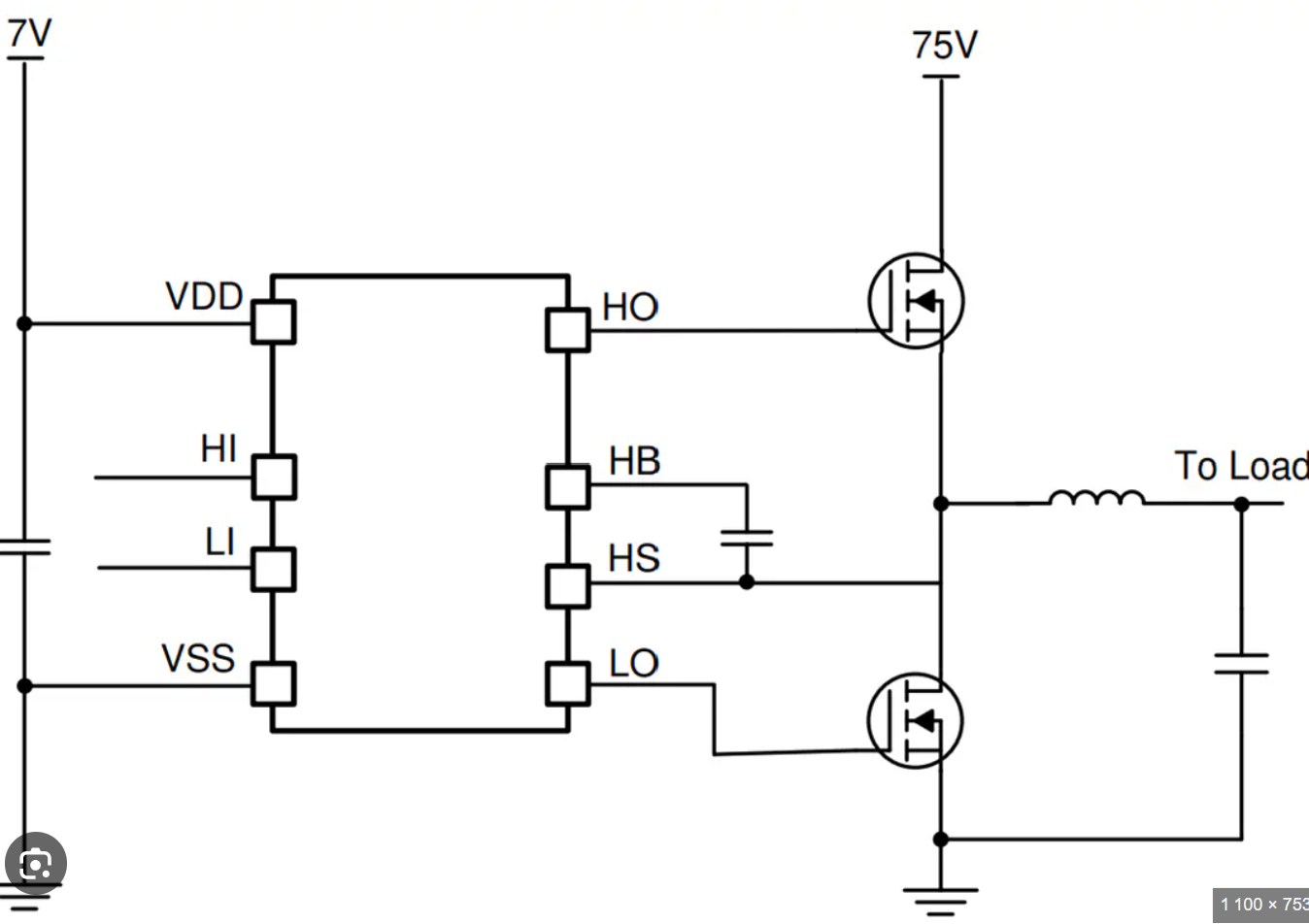
Dans ce schéma, comment le driver alimenté sous 7 v peut-il fournir à la grille du transistor de puissance coté H une tension supérieure à sa tension de source pour le maintenir "passant", tandis que sa source est à 75 v ? Est-ce parce que sa capacité de grille est restée chargée?
bonjour non c'est le drain qui est à 75V
quand on commute le mosfet du bas cela charge la capa entre HB et Hs, mosfet du bas OFF mosfet du haut ON on utilise la capa chargée pour piloter la grille du mosfet du haut.
c'est le principe de base on a TON = 99% et Toff =1% restant pour charger la capa jamais 100% de rapport cyclique.
ensuite l'idéal on regarde le datasheet d'un driver et les AN spécifiques, souvent les drivers sont alimentés en 10-12 voir 15V pour pouvoir piloter de nombreux mosfets.
si on prend un mosfet avec un Vgs peu elevé alors on peut se débrouiller avec les 11V ...
on peut aussi se débrouiller avec un ampli comme proposé au départ par pascal071
Sur ce schéma on comprend mieux parce que la diode est dessinée au lieu d'être intégrée dans la puce.
1- Quand la tension de sortie est à zéro, soit parce que le MOSFET du bas conduit, soit parce que le truc est à l'arrêt et la charge pas alimentée, le condensateur CB se charge depuis l'alim VCC à travers la diode.
2- Quand on a besoin d'activer le MOSFET du haut, ce condensateur sert d'alim pour la partie haute du driver. Quand le MOSFET du haut est passant, sa source monte en tension jusqu'à l'alim, et le condensateur qui est posé dessus est toujours chargé, donc il monte avec et fournit la tension supérieure à l'alim nécessaire pour garder le MOSFET activé.
L'inconvénient de ce système est que le condensateur fournit une alim très pratique mais temporaire car il doit être rechargé périodiquement, ce qui se produit à chaque fois que le MOSFET du bas est activé (étape 1 ci dessus), et donc... on ne peut pas garder le MOSFET du haut passant tout le temps. Il faut commuter de temps en temps. En PWM, le rapport cyclique est donc limité à un peu moins de 100%.
Le driver que j'ai mis en lien plus haut mesure aussi la tension sur le MOSFET du bas quand il est passant, en déduit le sens du courant, et émule une diode, comme ça on remplace la diode par du MOSFET pour réduire les pertes.
Si tu choisis d'utiliser ce genre de circuit c'est très important d'en prendre un avec "anti cross conduction" c'est-à-dire assez intelligent pour ne jamais activer les MOSFET du haut et du bas en même temps... ceux là ont une seule entrée de commande et se débrouille. Sur les drivers avec deux entrées, c'est à l'utilisateur de fournir les signaux pour chaque MOSFET, donc c'est plus compliqué.
Ok. J'étais donc sur la bonne voie.
Oui si je m'en tiens à la diode de roue libre, au lieu du MOSFET côté bas.
Au rapport cyclique de 50%, pour 60A moyen dans le moteur, elle dissiperait à elle seule dans les 15 watts (puis de moins en moins avec l'augmentation du régime) mais cette simplicité vaut quand même le coup que j'y réfléchisse.
Quoi qu'il en soit merci beaucoup pour ces messages qui m'ont bien éclairé.
Encore me faut-il trouver une diode Schottky de 60 A en TO 220 !
bonsoir et contrôler le lancement d'une lourde masse ?
c'est à dire contrôler ? masse ?
déplacement linéaire pignon crémaillère ?
ou angulaire pignon couronne dentée ? (moment d'inertie)
avant d'extrapoler il faut connaitre les contraintes mécaniques...
@A bobflux: J'ai bien compris maintenant l'intérêt de ce driver. Encore merci.
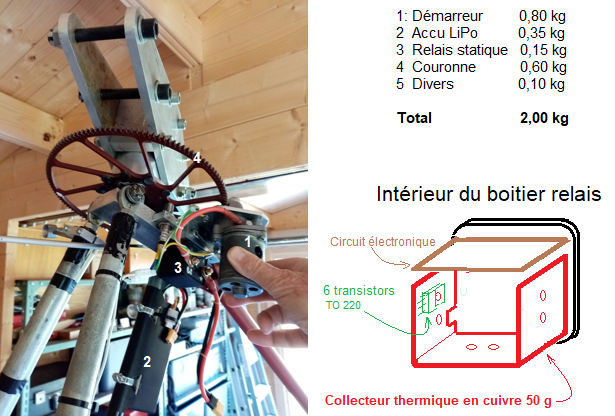
@ A racard: Il s'agit de pré-lancer électriquement le rotor (*) d'un autogire de construction amateur.
(*) Inertie = 50 kg.m2. Puissance absorbée aérodynamiquement sans vitesse de translation (proportionnelle à N3)= 300 w à 135 t/mn
Rapport de réduction: 14 dents / 129 dents.
Ainsi, le moteur de démarreur de scooter sera capable de pré-lancer le rotor à 130t/mn en une trentaine de secondes puis continuer encore à accélérer avec l'aide du couple aérodynamique dû au flux d'air relatif de la course au décollage (d'où le terme "autogire")
Vers 250 t/mn le régime du démarreur plafonnera et le pignon se dégagera de la couronne grâce au Bendix, tandis que le rotor continuera d'accélérer jusqu'à 400 t/mn en autorotation pure (décollage à 350 t/mn) Le démarreur devra être arrêté automatiquement après une minute de fonctionnement à vide pour ne pas décharger inutilement la batterie.
ok ok merci c'est plus clair
il faut déterminer en fonction du driver du nombre des mosfet Tr et Tf pour ensuite calculer cette puissance à la commutation et donc savoir combien de transistors sont nécessaires
Bonjour,
Je ne suis malheureusement pas outillé pour souder des composants montés en surface. Connaitrais-tu un driver similaire en Dip8 ?
Bonjour
photo de votre fer à souder ?
so8 se soude très bien
Braser des cms de taille raisonnable n'est pas compliqué, même pour les pad/drain des nmos.
Et Bobflux est de bon conseil à ce propos -> fer à souder KSGER
L'électronique c'est comme le violon. Soit on joue juste, soit on joue tzigane . . .
Les DIP n'existent plus.
La soudure manuelle est plus ou moins obsolète depuis que JLCPCB fait l'assemblage pour des tarifs défiant toute concurrence
Sinon oui KSGER T6 version 24V avec panne BCM2 et une alim 24V pour utilisation fixe ou batterie pour en faire un outil portable ! C'est super pratique. C'est une copie de HAKKO et les pannes sont compatibles. Avec la panne BCM2 tu soudes aussi bien du petit CMS que du fil de cuivre 2.5mm² ou des dos de MOSFET car 90W régulé ça envoie la patate, avec la résistance moulée dans la céramique au bout de la panne et la panne plutôt épaisse et tout en cuivre, la conduction de la chaleur est tip top. Rien à voir avec les fers où tu changes juste le bout de la panne et la résistance est solidaire de la poignée. Pour ce fer, les autres pannes chinoises sont beaucoup moins performantes.
au vu de la qualité de la partie mécanique que j'ai pu voir.
je ne pense pas que le demandeur harmoniciste soit enclin à investir dans un fer de la marque ksger, je peux me tromper...
Ça dépend si il l'utilise en vol ou pas
En effet. Sauf le moteur, la boite à roulement, et la couronne dentée usinée au jet d'eau, tout est "fait main" y compris le rotor et l'hélice.