


Bonjour à vous, je me permet de poster mon problème car j'ai beau tourner mon problème dans tout les sens je ne m'en sort pas.
"Please HELP ME !!!"
situation cherchee.jpg
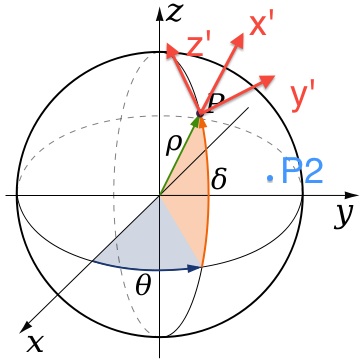
Je cherche à récuperer les coordonnées cartésiennes d'un point (P2), coordonnées connue dans le repere d'origine (x,y,z), dans une repere de reference (x',y',z').
Avec la particularité que je repere de reference est:
- une rotation suivant l'axe Z de θ
- une rotation suivant l'axe Y de δ
- une translation de ρ = vecteur (OP)
Mes calculs:
traitement de la transaltion:
a = xP2 - xP
b = yP2 - yP
c = zP2 - zP
traitement des rotations:
x'= cos(θ)*cos(δ)*a - sin(θ)*cos(δ)*b + sin(δ)*c
y'= [cos(θ)*sin(δ)*sin(0)+sin(θ)*co s(0)]*a - [sin(θ)*sin(δ)*sin(0)+cos(θ)*co s(0)]*b + cos(δ)*sin(0)*c
z'= [- cos(θ)*sin(δ)*cos(0) + sin(θ)*sin(0)]*a + [sin(θ)*sin(δ)*cos(0)+cos(θ)*co s(0)]*b + cos(δ)*cos(0)*c
c'est equation decoule de cette artivle : http://fr.wikipedia.org/wiki/Matrice_de_rotation
Voila, c'est bien beau tout ça mais ça ne fonctionne pas, quelqu'un pourrait me secourir? Merci.
-----

{kind=link}